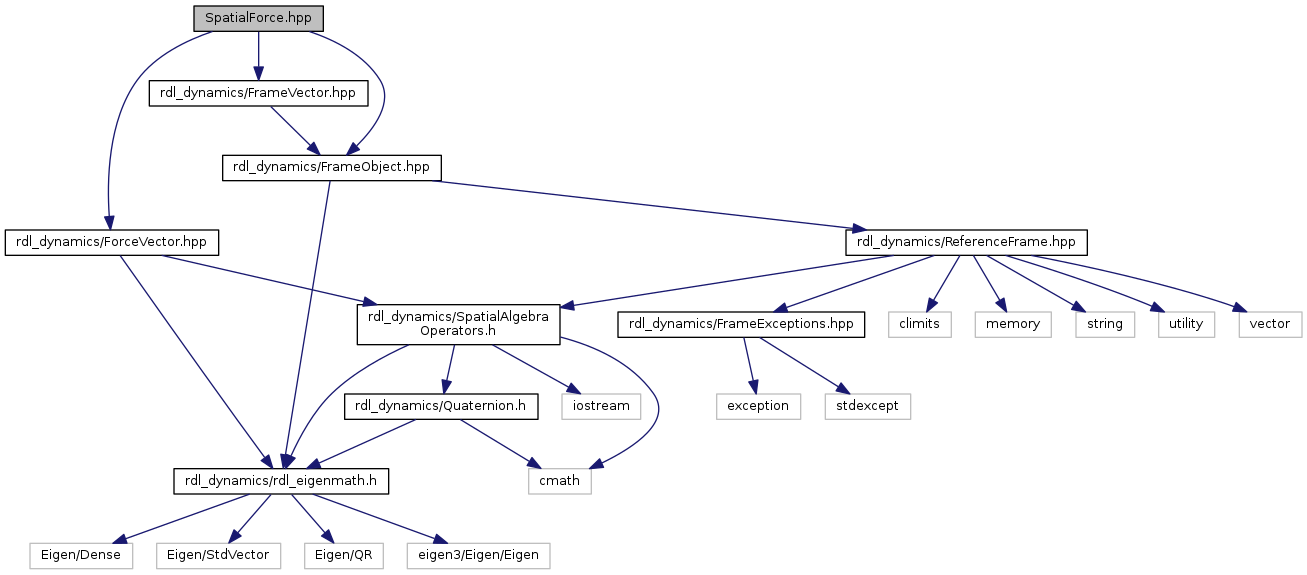
#include "rdl_dynamics/ForceVector.hpp"#include "rdl_dynamics/FrameObject.hpp"#include "rdl_dynamics/FrameVector.hpp"
Include dependency graph for SpatialForce.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::SpatialForce |
| A SpatialForce is a spatial vector with the angular part being three moments and the linear part being 3 linear forces. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef std::vector< SpatialForce, Eigen::aligned_allocator< SpatialForce > > | RobotDynamics::Math::SpatialForceV |
Functions | |
| SpatialForce | RobotDynamics::Math::operator* (SpatialForce f1, double scale) |
| Overloaded * operator to scale a spatial force by a scalar value. More... | |
| SpatialForce | RobotDynamics::Math::operator+ (SpatialForce f1, const SpatialForce &f2) |
| Overloaded + operator to add two SpatialForce vectors and return the result in a new SpatialForce. Frame checks are performed. More... | |
| SpatialForce | RobotDynamics::Math::operator- (SpatialForce f1, const SpatialForce &f2) |
| Overloaded - operator to add two SpatialForce vectors and return the result in a new SpatialForce. Frame checks are performed. More... | |