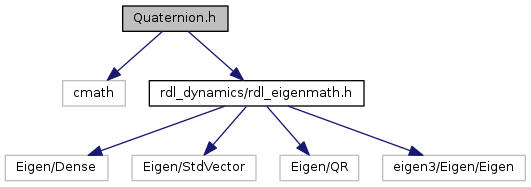
Include dependency graph for Quaternion.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::Quaternion |
| Quaternion that are used for singularity free joints. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |