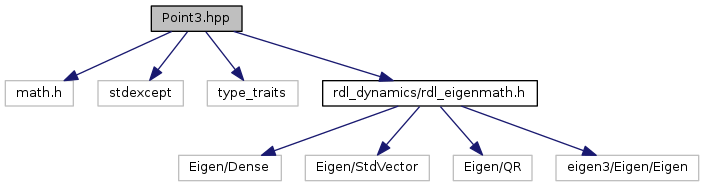
#include <math.h>#include <stdexcept>#include <type_traits>#include "rdl_dynamics/rdl_eigenmath.h"
Include dependency graph for Point3.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::Point3d |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef std::vector< Point3d, Eigen::aligned_allocator< Point3d > > | RobotDynamics::Math::Point3V |
Functions | |
| template<typename T > | |
| Point3d | RobotDynamics::Math::operator* (Point3d p, const T scale) |
| template<typename T > | |
| Point3d | RobotDynamics::Math::operator* (const T scale, Point3d p) |
| Point3d | RobotDynamics::Math::operator+ (Point3d p, const Vector3d &v) |
| Point3d | RobotDynamics::Math::operator- (Point3d p, const Vector3d &v) |
| Vector3d | RobotDynamics::Math::operator- (Point3d p1, const Point3d &p2) |
| std::ostream & | RobotDynamics::Math::operator<< (std::ostream &os, const Point3d &point) |
| static Matrix3d | RobotDynamics::Math::toTildeForm (const Point3d &p) |