#include <assert.h>#include <iostream>#include "rdl_dynamics/FrameVectorPair.hpp"#include "rdl_dynamics/Model.h"
Include dependency graph for Kinematics.h:
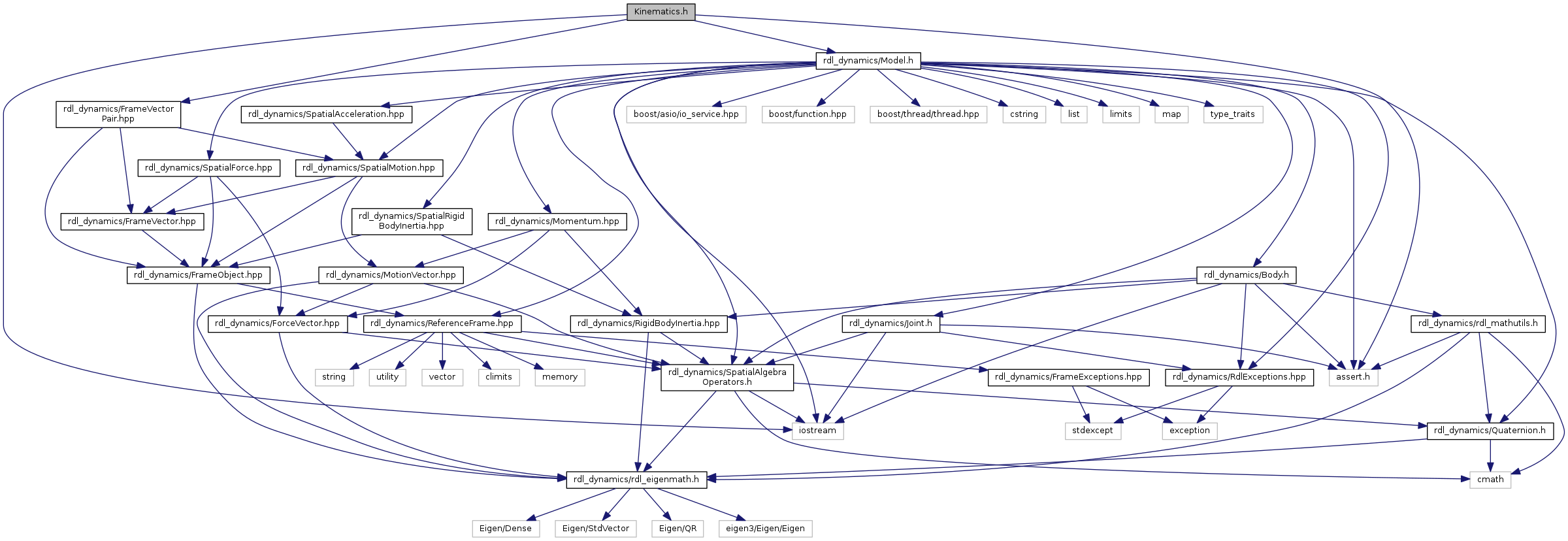
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
Functions | |
| void | RobotDynamics::calcBodySpatialJacobian (Model &model, const Math::VectorNd &Q, unsigned int body_id, Math::MatrixNd &G, bool update_kinematics=true) |
Computes the spatial jacobian for a body. The result will be returned via the G argument and represents the body Jacobian expressed at the origin of the body. The corresponding spatial velocity of the body w.r.t the world frame expressed in body frame can be calculated, for the  body, as body, as  . For the spatial jacobian of body . For the spatial jacobian of body  , each column j is computed as follows. More... , each column j is computed as follows. More... | |
| void | RobotDynamics::calcBodySpatialJacobianDot (Model &model, const Math::VectorNd &Q, const Math::VectorNd QDot, unsigned int body_id, Math::MatrixNd &G, const bool update_kinematics=true) |
Computes the time derivative of the spatial jacobian for a body. The result will be returned via the G argument and represents the time derivative of the body Jacobian expressed at the origin of the body. The corresponding spatial acceleration of the body w.r.t the world frame expressed in body frame can be calculated, for the th body, as  where where  is the body jacobian of body . More... is the body jacobian of body . More... | |
| Math::FrameVector | RobotDynamics::calcPointAcceleration (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, unsigned int body_id, const Math::Vector3d &point_position, bool update_kinematics=true) |
| Computes the linear acceleration of a point on a body. More... | |
| Math::FrameVectorPair | RobotDynamics::calcPointAcceleration6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, unsigned int body_id, const Math::Vector3d &point_position, bool update_kinematics=true) |
| Computes linear and angular acceleration of a point on a body. More... | |
| Math::FrameVectorPair | RobotDynamics::calcPointAcceleration6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, ReferenceFramePtr body_frame, ReferenceFramePtr relative_body_frame, ReferenceFramePtr expressedInFrame=nullptr, const bool update_kinematics=true) |
| Computes linear and angular acceleration of a reference frame, relative to another reference frame and expressed in a third reference frame. More... | |
| void | RobotDynamics::calcPointJacobian (Model &model, const Math::VectorNd &Q, unsigned int body_id, const Math::Vector3d &point_position, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes the 3D point jacobian for a point on a body. More... | |
| void | RobotDynamics::calcPointJacobian (Model &model, const Math::VectorNd &Q, Math::MatrixNd &G, ReferenceFramePtr frame, bool update_kinematics=true) |
Compute the 3D point jacobian of the origin of a reference frame If a position of a point is computed by a function  for which its time derivative is for which its time derivative is  then this function computes the jacobian matrix . More... then this function computes the jacobian matrix . More... | |
| void | RobotDynamics::calcPointJacobian6D (Model &model, const Math::VectorNd &Q, Math::MatrixNd &G, ReferenceFramePtr frame, bool update_kinematics=true) |
| Compute the 6D point jacobian of the origin of a reference frame If a position of a point is computed by a function for which its time derivative is then this function computes the jacobian matrix . More... | |
| void | RobotDynamics::calcPointJacobian6D (Model &model, const Math::VectorNd &Q, unsigned int body_id, const Math::Vector3d &point_position, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes a 6-D Jacobian for a point on a body. More... | |
| void | RobotDynamics::calcPointJacobianDot (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, unsigned int body_id, const Math::Vector3d &point_position, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes the time derivative of the linear components the a point jacobian on a body. More... | |
| void | RobotDynamics::calcPointJacobianDot (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, RobotDynamics::ReferenceFramePtr frame, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes the time derivative of a point jacobian of a point on a body. Only computes the linear elemets. More... | |
| void | RobotDynamics::calcPointJacobianDot6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, RobotDynamics::ReferenceFramePtr frame, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes the time derivative of a point jacobian of a point on a body. More... | |
| void | RobotDynamics::calcPointJacobianDot6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, unsigned int body_id, const Math::Vector3d &point_position, Math::MatrixNd &G, bool update_kinematics=true) |
| Computes the 6D time derivative of a point jacobian on a body. More... | |
| Math::FrameVector | RobotDynamics::calcPointVelocity (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, unsigned int body_id, const Math::Vector3d &point_position, bool update_kinematics=true) |
| Computes the velocity of a point on a body. More... | |
| Math::FrameVectorPair | RobotDynamics::calcPointVelocity6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, unsigned int body_id, const Math::Vector3d &point_position, bool update_kinematics=true) |
| Computes angular and linear velocity of a point that is fixed on a body. More... | |
| Math::FrameVectorPair | RobotDynamics::calcPointVelocity6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, RobotDynamics::ReferenceFramePtr frame, bool update_kinematics=true) |
| Computes angular and linear velocity of the origin of a reference frame relative to world and expressed in world frame. More... | |
| Math::FrameVectorPair | RobotDynamics::calcPointVelocity6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, RobotDynamics::ReferenceFramePtr baseFrame, RobotDynamics::ReferenceFramePtr relativeFrame, RobotDynamics::ReferenceFramePtr expressedInFrame=RobotDynamics::ReferenceFrame::getWorldFrame(), bool update_kinematics=true) |
| Computes angular and linear velocity of the origin of a reference frame relative to another reference frame and expressed in a third reference frame. More... | |
| void | RobotDynamics::calcRelativeBodySpatialJacobian (Model &model, const Math::VectorNd &Q, Math::MatrixNd &G, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=nullptr, bool update_kinematics=true) |
Computes the jacobian of a frame  with being the "base" frame, with being the "base" frame,  being the "relative" frame, and being the "relative" frame, and  being the "expressed in" frame. Multiplying this jacobian by a vector of joint velocities will result in the spatial motion of the baseFrame w.r.t relativeFrame expressed in expressedInFrame, a.k.a being the "expressed in" frame. Multiplying this jacobian by a vector of joint velocities will result in the spatial motion of the baseFrame w.r.t relativeFrame expressed in expressedInFrame, a.k.a  . More... . More... | |
| void | RobotDynamics::calcRelativeBodySpatialJacobianAndJacobianDot (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &G, Math::MatrixNd &GDot, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=nullptr, bool update_kinematics=true) |
| Computes both the body spatial jacobian and its time derivative. This function will be a bit more efficient at computing the jacobian and it's time derivative if you need both matrices rather than computing them with separate function calls. More... | |
| void | RobotDynamics::calcRelativeBodySpatialJacobianDot (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &G, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=nullptr, bool update_kinematics=true) |
Computes the rate of change of the jacobian,  , with being the "base" frame, being the relative" frame, and \f$k\f$ being the "expressed in" frame. This jacobian is such that the following is true, , with being the "base" frame, being the relative" frame, and \f$k\f$ being the "expressed in" frame. This jacobian is such that the following is true,  where where  is the spatial acceleration of frame w.r.t frame , expressed in frame . Additionally the jacobian can be computed by RobotDynamics::calcRelativeBodySpatialJacobian. More... is the spatial acceleration of frame w.r.t frame , expressed in frame . Additionally the jacobian can be computed by RobotDynamics::calcRelativeBodySpatialJacobian. More... | |
| void | RobotDynamics::calcRelativePointJacobian6D (Model &model, const Math::VectorNd &Q, Math::MatrixNd &G, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=RobotDynamics::ReferenceFrame::getWorldFrame(), bool update_kinematics=true) |
| Compute the 6D jacobian of the origin of a reference frame relative to the origin of another reference frame and express the result in a third frame. More... | |
| void | RobotDynamics::calcRelativePointJacobianAndJacobianDot6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &G, Math::MatrixNd &GDot, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=RobotDynamics::ReferenceFrame::getWorldFrame(), bool update_kinematics=true) |
| Compute the point Jacobian of the origin of baseFrame, relative to the origin of relativeFrame, expressed in expressedInFrame. Also compute that point Jacobians time derivative. More... | |
| void | RobotDynamics::calcRelativePointJacobianDot6D (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &G, ReferenceFramePtr baseFrame, ReferenceFramePtr relativeFrame, ReferenceFramePtr expressedInFrame=RobotDynamics::ReferenceFrame::getWorldFrame(), bool update_kinematics=true) |
| Compute the time derivative of the 6D jacobian of the origin of a reference frame relative to the origin of another reference frame and express the result in a third frame. More... | |
| Math::SpatialAcceleration | RobotDynamics::calcSpatialAcceleration (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, const unsigned int body_id, const unsigned int relative_body_id, ReferenceFramePtr expressedInFrame=nullptr, const bool update_kinematics=true) |
| Compute the spatial acceleration of any body with respect to any other body and express the result in an arbitrary reference frame. The returned RobotDynamicS::Math::SpatialAcceleration can be expressed in the reference frame of choice by supplying the expressedInFrame argument. If left to the default value of nullptr, the result will be expressed in the reference frame corresponding to body_id. More... | |
| Math::SpatialAcceleration | RobotDynamics::calcSpatialAcceleration (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, ReferenceFramePtr body_frame, ReferenceFramePtr relative_body_frame, ReferenceFramePtr expressedInFrame=nullptr, const bool update_kinematics=true) |
| Compute the spatial acceleration of any frame with respect to any other frame and express the result in an arbitrary third frame. The returned RobotDynamicS::Math::SpatialAcceleration can be expressed in the reference frame of choice by supplying the expressedInFrame argument. If left to the default value of nullptr, the result will be expressed in body_frame. More... | |
| Math::SpatialMotion | RobotDynamics::calcSpatialVelocity (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, ReferenceFramePtr body_frame, ReferenceFramePtr relative_body_frame, ReferenceFramePtr expressedInFrame=nullptr, const bool update_kinematics=true) |
Compute the spatial velocity of any frame with respect to any other frame, expressed in an arbirtary third frame. The returned RobotDynamicS::Math::SpatialMotion is expressed in body_frame unless th expressedInFrame is provided. Each time RobotDynamics::updateKinematics is called, the spatial velocity of each body with respect to the world, and expressed in body frame is calculated. For body  this is written as this is written as  . Given another body, body . Given another body, body  , the velocity of body relative to body and expressed in body frame is computed by, , the velocity of body relative to body and expressed in body frame is computed by,
. More... | |
| Math::SpatialMotion | RobotDynamics::calcSpatialVelocity (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const unsigned int body_id, const unsigned int relative_body_id, ReferenceFramePtr expressedInFrame=nullptr, const bool update_kinematics=true) |
| Compute the spatial velocity of any body with respect to any other body. The returned RobotDynamicS::Math::SpatialMotion is expressed in the body frame of body body_id. Each time RobotDynamics::updateKinematics is called, the spatial velocity of each body with respect to the world, and expressed in body frame is calculated. For body this is written as . Given another body, body , the velocity of body relative to body and expressed in body frame is computed by,
. More... | |
| bool | RobotDynamics::inverseKinematics (Model &model, const Math::VectorNd &Qinit, const std::vector< unsigned int > &body_id, const std::vector< Math::Vector3d > &body_point, const std::vector< Math::Vector3d > &target_pos, Math::VectorNd &Qres, double step_tol=1.0e-12, double lambda=0.01, unsigned int max_iter=50) |
| Computes the inverse kinematics iteratively using a damped Levenberg-Marquardt method (also known as Damped Least Squares method) More... | |
| void | RobotDynamics::updateAccelerations (Model &model, const Math::VectorNd &QDDot) |
| Computes only the accelerations of the bodies. More... | |
| void | RobotDynamics::updateKinematics (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot) |
| Updates and computes velocities and accelerations of the bodies. More... | |
| void | RobotDynamics::updateKinematicsCustom (Model &model, const Math::VectorNd *Q, const Math::VectorNd *QDot=nullptr, const Math::VectorNd *QDDot=nullptr) |
| Selectively updates model internal states of body positions, velocities and/or accelerations. More... | |
| void | RobotDynamics::updateKinematicsCustomParallel (Model &model, const Math::VectorNd *Q, const Math::VectorNd *QDot=nullptr, const Math::VectorNd *QDDot=nullptr) |
| Selectively updates model internal states of body positions, velocities and/or accelerations and spawns threads far each branched chain. More... | |
| void | RobotDynamics::updateKinematicsParallel (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot) |
| Updates and computes velocities and accelerations of the bodies. More... | |
![\[ v^{i,j}_{i} = v^{i,0}_{i} - ^{i}X_{j} v^{j,0}_{j} \]](form_99.png)