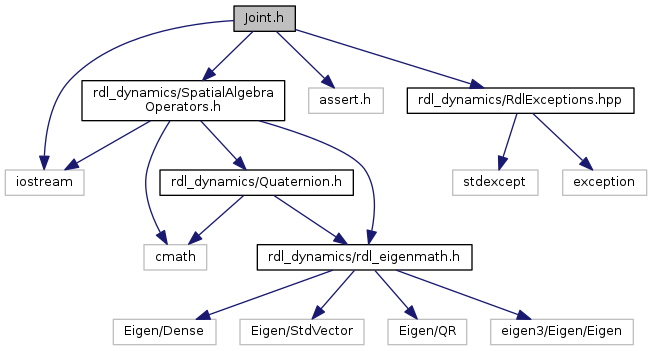
#include "rdl_dynamics/SpatialAlgebraOperators.h"#include <assert.h>#include <iostream>#include "rdl_dynamics/RdlExceptions.hpp"
Include dependency graph for Joint.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | RobotDynamics::CustomJoint |
| CustomJoint is a struct used to create a joint with user defined parameters. This is accomplished by overriding the RobotDynamics::Joint::jcalc methods that calculate each joints kinematic parameters. More... | |
| struct | RobotDynamics::Joint |
| Describes a joint relative to the predecessor body. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
Functions | |
| void | RobotDynamics::jcalc (Model &model, unsigned int joint_id, const Math::VectorNd &q, const Math::VectorNd &qdot) |
| Computes all variables for a joint model and updates the body frame as well as the body's center of mass frame. More... | |
| void | RobotDynamics::jcalc_X_lambda_S (Model &model, unsigned int joint_id, const Math::VectorNd &q) |
| Math::SpatialTransform | RobotDynamics::jcalc_XJ (Model &model, unsigned int joint_id, const Math::VectorNd &q) |