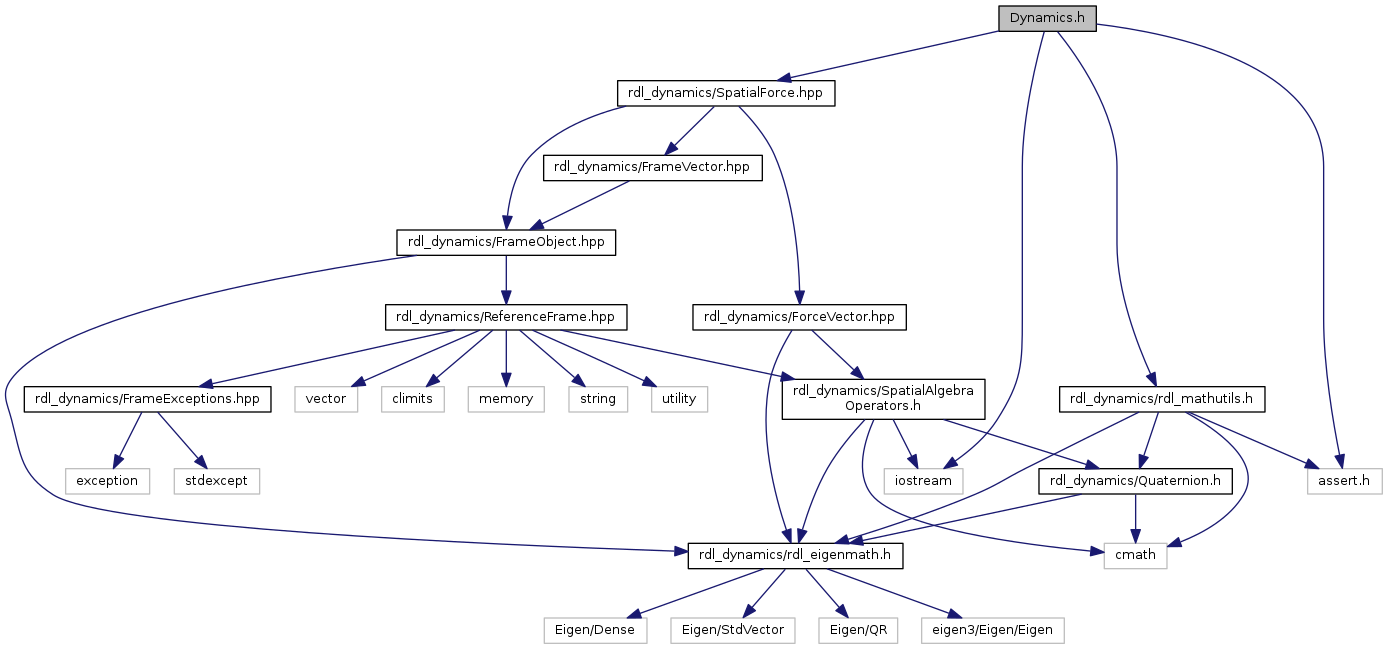
#include <assert.h>#include <iostream>#include "rdl_dynamics/SpatialForce.hpp"#include "rdl_dynamics/rdl_mathutils.h"
Include dependency graph for Dynamics.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
Functions | |
| void | RobotDynamics::calcBodyGravityWrench (Model &model, unsigned int body_id, RobotDynamics::Math::SpatialForce &gravity_wrench) |
| Calculate the wrench due to gravity on a body. More... | |
| void | RobotDynamics::calcMInvTimesTau (Model &model, const Math::VectorNd &Q, const Math::VectorNd &Tau, Math::VectorNd &QDDot, bool update_kinematics=true) |
| Computes the effect of multiplying the inverse of the joint space inertia matrix with a vector in linear time. More... | |
| void | RobotDynamics::compositeRigidBodyAlgorithm (Model &model, const Math::VectorNd &Q, Math::MatrixNd &H, bool update_kinematics=true) |
| Computes the joint space inertia matrix by using the Composite Rigid Body Algorithm. More... | |
| void | RobotDynamics::coriolisEffects (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::VectorNd &Tau, bool update_kinematics=true) |
| Computes the coriolis forces. More... | |
| void | RobotDynamics::forwardDynamics (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &Tau, Math::VectorNd &QDDot, Math::SpatialForceV *f_ext=nullptr, bool update_kinematics=true) |
| Computes forward dynamics with the Articulated Body Algorithm. More... | |
| void | RobotDynamics::forwardDynamicsLagrangian (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &Tau, Math::VectorNd &QDDot, Math::MatrixNd &H, Math::VectorNd &C, Math::LinearSolver linear_solver=Math::LinearSolverColPivHouseholderQR, Math::SpatialForceV *f_ext=nullptr, bool update_kinematics=true) |
| Computes forward dynamics by building and solving the full Lagrangian equation. More... | |
| void | RobotDynamics::gravityEffects (Model &model, Math::VectorNd &Tau) |
| Computes the gravity vector. More... | |
| void | RobotDynamics::inverseDynamics (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::VectorNd &QDDot, Math::VectorNd &Tau, Math::SpatialForceV *f_ext=nullptr, bool update_kinematics=true) |
| void | RobotDynamics::nonlinearEffects (Model &model, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::VectorNd &Tau, bool update_kinematics=true) |
| Computes the coriolis forces. More... | |