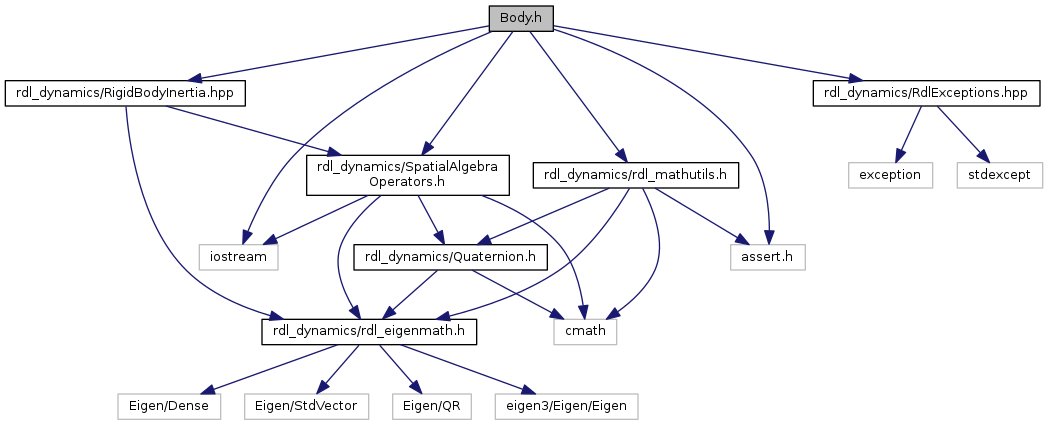
#include "rdl_dynamics/SpatialAlgebraOperators.h"#include "rdl_dynamics/RigidBodyInertia.hpp"#include "rdl_dynamics/rdl_mathutils.h"#include <assert.h>#include <iostream>#include "rdl_dynamics/RdlExceptions.hpp"
Include dependency graph for Body.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | RobotDynamics::Body |
| Describes all properties of a single body. More... | |
| struct | RobotDynamics::FixedBody |
| Keeps the information of a body and how it is attached to another body. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |