#include "rdl_dynamics/Model.h"
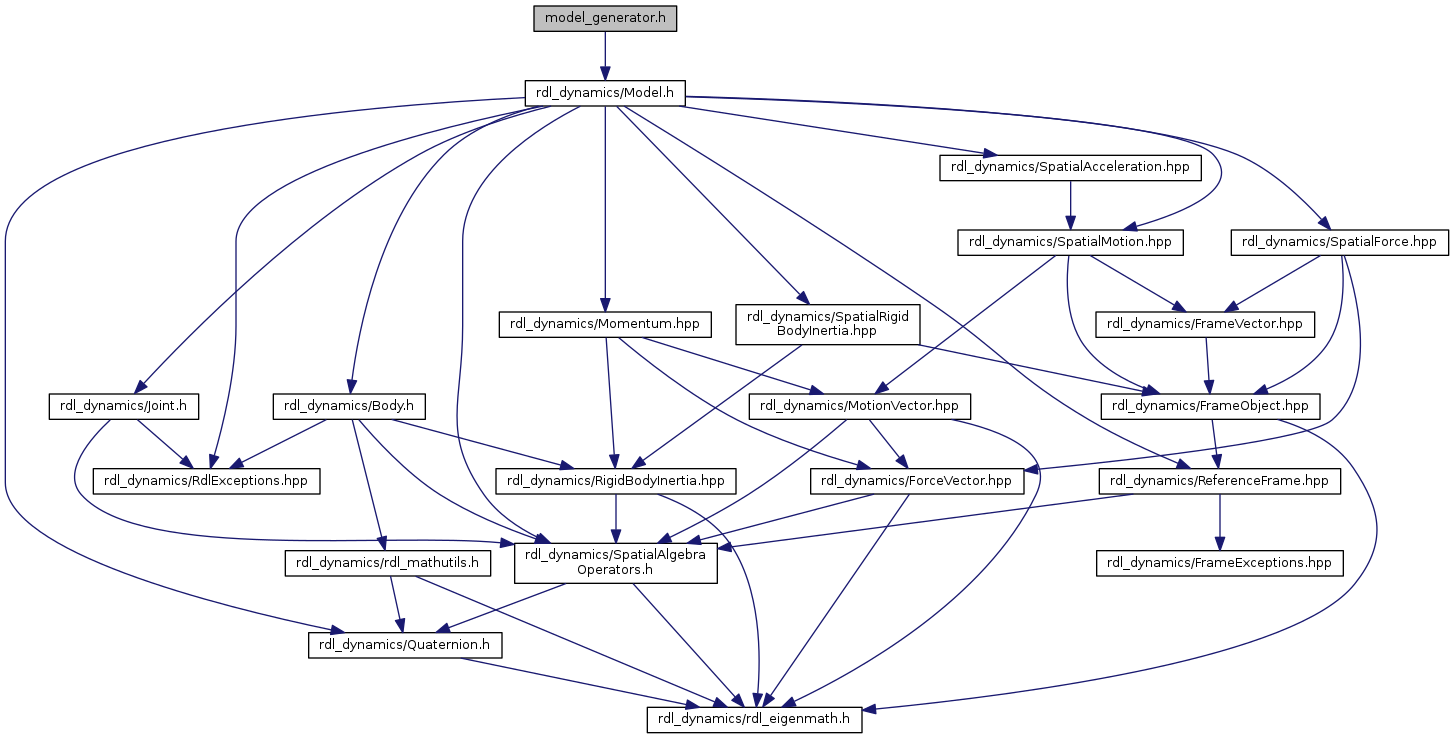
Include dependency graph for model_generator.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| RobotDynamics | |
Functions | |
| void | generate_planar_tree (RobotDynamics::ModelPtr model, int depth) |
Function Documentation
| void generate_planar_tree | ( | RobotDynamics::ModelPtr | model, |
| int | depth | ||
| ) |
Definition at line 29 of file model_generator.cc.