#include <JointPath.h>
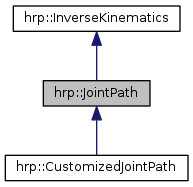
 Public Member Functions inherited from
Public Member Functions inherited from Protected Member Functions | |
| virtual void | onJointPathUpdated () |
Protected Attributes | |
| bool | isBestEffortIKMode |
| double | maxIKErrorSqr |
Private Member Functions | |
| void | extractJoints () |
| void | initialize () |
Private Attributes | |
| std::vector< Link * > | joints |
| LinkPath | linkPath |
| int | numUpwardJointConnections |
Detailed Description
Definition at line 26 of file JointPath.h.
Constructor & Destructor Documentation
| JointPath::JointPath | ( | ) |
Definition at line 25 of file JointPath.cpp.
Definition at line 31 of file JointPath.cpp.
| JointPath::JointPath | ( | Link * | end | ) |
Definition at line 40 of file JointPath.cpp.
|
virtual |
Definition at line 56 of file JointPath.cpp.
Member Function Documentation
|
inline |
Definition at line 50 of file JointPath.h.
|
inline |
Definition at line 62 of file JointPath.h.
Implements hrp::InverseKinematics.
Reimplemented in hrp::CustomizedJointPath.
Definition at line 252 of file JointPath.cpp.
| bool JointPath::calcInverseKinematics | ( | const Vector3 & | base_p, |
| const Matrix33 & | base_R, | ||
| const Vector3 & | end_p, | ||
| const Matrix33 & | end_R | ||
| ) |
Definition at line 238 of file JointPath.cpp.
Definition at line 128 of file JointPath.cpp.
| void JointPath::calcJacobianDot | ( | dmatrix & | out_dJ, |
| const Vector3 & | local_p = Vector3::Zero() |
||
| ) | const |
Definition at line 173 of file JointPath.cpp.
|
inline |
Definition at line 38 of file JointPath.h.
|
inline |
Definition at line 54 of file JointPath.h.
|
private |
Definition at line 83 of file JointPath.cpp.
Definition at line 62 of file JointPath.cpp.
| bool JointPath::find | ( | Link * | end | ) |
Definition at line 73 of file JointPath.cpp.
|
virtual |
Reimplemented in hrp::CustomizedJointPath.
Definition at line 341 of file JointPath.cpp.
Definition at line 49 of file JointPath.cpp.
|
inline |
Definition at line 58 of file JointPath.h.
|
inline |
Definition at line 68 of file JointPath.h.
Definition at line 46 of file JointPath.h.
|
inline |
Definition at line 42 of file JointPath.h.
|
protectedvirtual |
Reimplemented in hrp::CustomizedJointPath.
Definition at line 122 of file JointPath.cpp.
|
virtual |
Definition at line 231 of file JointPath.cpp.
|
virtual |
Definition at line 225 of file JointPath.cpp.
Member Data Documentation
|
protected |
Definition at line 90 of file JointPath.h.
|
private |
Definition at line 98 of file JointPath.h.
|
private |
Definition at line 97 of file JointPath.h.
|
protected |
Definition at line 89 of file JointPath.h.
|
private |
Definition at line 99 of file JointPath.h.
The documentation for this class was generated from the following files: