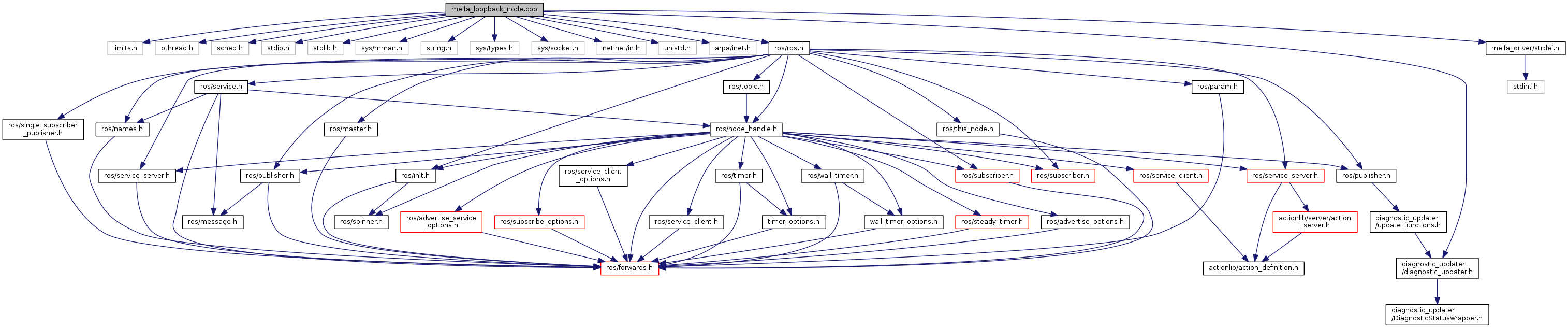
#include <limits.h>#include <pthread.h>#include <sched.h>#include <stdio.h>#include <stdlib.h>#include <sys/mman.h>#include <string.h>#include <sys/types.h>#include <sys/socket.h>#include <netinet/in.h>#include <unistd.h>#include <arpa/inet.h>#include <ros/ros.h>#include <diagnostic_updater/diagnostic_updater.h>#include "melfa_driver/strdef.h"
Include dependency graph for melfa_loopback_node.cpp:
Go to the source code of this file.
Classes | |
| class | LoopbackNode |
Functions | |
| void | loop_diagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
| int | main (int argc, char **argv) |
| Main function. More... | |
Variables | |
| ros::Time | g_time_now |
| ros::Time | g_time_old |
Detailed Description
Loopback node to test melfa_driver_node
Definition in file melfa_loopback_node.cpp.
Function Documentation
| void loop_diagnostic | ( | diagnostic_updater::DiagnosticStatusWrapper & | stat | ) |
Definition at line 179 of file melfa_loopback_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Main function.
Definition at line 189 of file melfa_loopback_node.cpp.
Variable Documentation
| ros::Time g_time_now |
Definition at line 36 of file melfa_loopback_node.cpp.
| ros::Time g_time_old |
Definition at line 36 of file melfa_loopback_node.cpp.