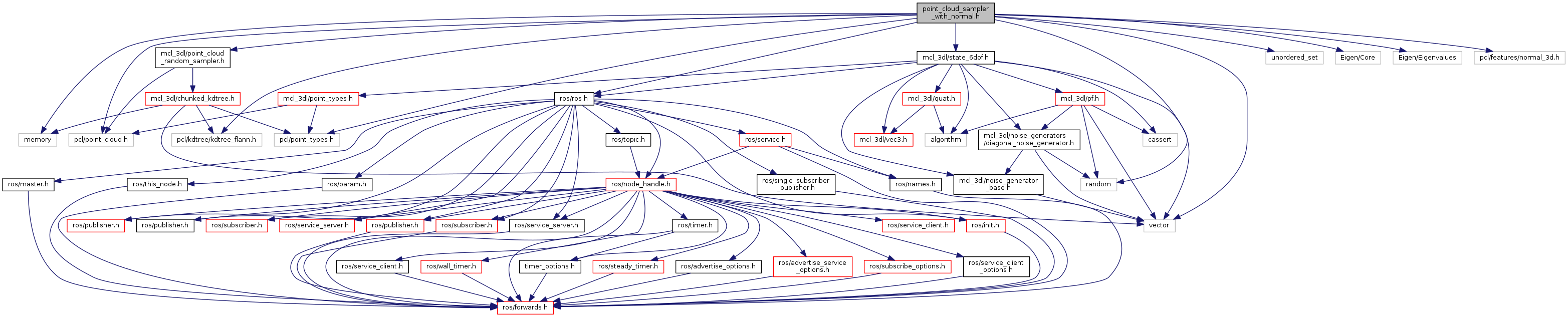
#include <memory>#include <random>#include <unordered_set>#include <vector>#include <Eigen/Core>#include <Eigen/Eigenvalues>#include <pcl/features/normal_3d.h>#include <pcl/kdtree/kdtree_flann.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <ros/ros.h>#include <mcl_3dl/point_cloud_random_sampler.h>#include <mcl_3dl/state_6dof.h>
Include dependency graph for point_cloud_sampler_with_normal.h:
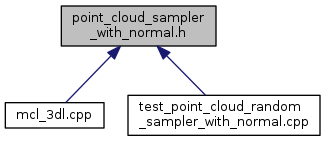
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mcl_3dl::PointCloudSamplerWithNormal< POINT_TYPE > |
Namespaces | |
| mcl_3dl | |