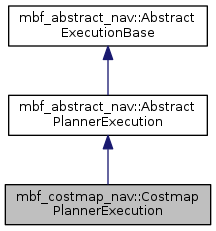
The CostmapPlannerExecution binds a global costmap to the AbstractPlannerExecution and uses the nav_core/BaseCostmapPlanner class as base plugin interface. This class makes move_base_flex compatible to the old move_base. More...
#include <costmap_planner_execution.h>
Public Member Functions | |
| CostmapPlannerExecution (const std::string &planner_name, const mbf_costmap_core::CostmapPlanner::Ptr &planner_ptr, const CostmapWrapper::Ptr &costmap_ptr, const MoveBaseFlexConfig &config) | |
| Constructor. More... | |
| virtual | ~CostmapPlannerExecution () |
| Destructor. More... | |
 Public Member Functions inherited from mbf_abstract_nav::AbstractPlannerExecution Public Member Functions inherited from mbf_abstract_nav::AbstractPlannerExecution | |
| AbstractPlannerExecution (const std::string &name, const mbf_abstract_core::AbstractPlanner::Ptr &planner_ptr, const MoveBaseFlexConfig &config) | |
| virtual bool | cancel () |
| double | getCost () const |
| double | getFrequency () const |
| ros::Time | getLastValidPlanTime () const |
| std::vector< geometry_msgs::PoseStamped > | getPlan () const |
| PlanningState | getState () const |
| bool | isPatienceExceeded () const |
| void | reconfigure (const MoveBaseFlexConfig &config) |
| void | setNewGoal (const geometry_msgs::PoseStamped &goal, double tolerance) |
| void | setNewStart (const geometry_msgs::PoseStamped &start) |
| void | setNewStartAndGoal (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, double tolerance) |
| bool | start (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, double tolerance) |
| virtual | ~AbstractPlannerExecution () |
| Public Member Functions inherited from mbf_abstract_nav::AbstractExecutionBase | |
| AbstractExecutionBase (std::string name) | |
| std::string | getMessage () |
| std::string | getName () |
| uint32_t | getOutcome () |
| void | join () |
| virtual bool | start () |
| virtual void | stop () |
| boost::cv_status | waitForStateUpdate (boost::chrono::microseconds const &duration) |
Private Member Functions | |
| virtual uint32_t | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, double tolerance, std::vector< geometry_msgs::PoseStamped > &plan, double &cost, std::string &message) |
| Calls the planner plugin to make a plan from the start pose to the goal pose with the given tolerance, if a goal tolerance is enabled in the planner plugin. More... | |
| void | postRun () |
| Implementation-specific cleanup function, called right after execution. This method overrides abstract execution empty implementation with underlying map-specific cleanup code. More... | |
| void | preRun () |
| Implementation-specific setup function, called right before execution. This method overrides abstract execution empty implementation with underlying map-specific setup code. More... | |
| mbf_abstract_nav::MoveBaseFlexConfig | toAbstract (const MoveBaseFlexConfig &config) |
Private Attributes | |
| const CostmapWrapper::Ptr & | costmap_ptr_ |
| Shared pointer to the global planner costmap. More... | |
| bool | lock_costmap_ |
| Whether to lock costmap before calling the planner (see issue #4 for details) More... | |
| std::string | planner_name_ |
| Name of the planner assigned by the class loader. More... | |
Additional Inherited Members | |
| Public Types inherited from mbf_abstract_nav::AbstractPlannerExecution | |
| enum | PlanningState |
| typedef boost::shared_ptr< AbstractPlannerExecution > | Ptr |
| Public Attributes inherited from mbf_abstract_nav::AbstractPlannerExecution | |
| CANCELED | |
| FOUND_PLAN | |
| INITIALIZED | |
| INTERNAL_ERROR | |
| MAX_RETRIES | |
| NO_PLAN_FOUND | |
| PAT_EXCEEDED | |
| PLANNING | |
| STARTED | |
| STOPPED | |
| Protected Member Functions inherited from mbf_abstract_nav::AbstractPlannerExecution | |
| virtual void | run () |
| Protected Attributes inherited from mbf_abstract_nav::AbstractPlannerExecution | |
| mbf_abstract_core::AbstractPlanner::Ptr | planner_ |
| std::string | plugin_name_ |
| Protected Attributes inherited from mbf_abstract_nav::AbstractExecutionBase | |
| bool | cancel_ |
| boost::condition_variable | condition_ |
| std::string | message_ |
| std::string | name_ |
| uint32_t | outcome_ |
| boost::thread | thread_ |
Detailed Description
The CostmapPlannerExecution binds a global costmap to the AbstractPlannerExecution and uses the nav_core/BaseCostmapPlanner class as base plugin interface. This class makes move_base_flex compatible to the old move_base.
Definition at line 60 of file costmap_planner_execution.h.
Constructor & Destructor Documentation
| mbf_costmap_nav::CostmapPlannerExecution::CostmapPlannerExecution | ( | const std::string & | planner_name, |
| const mbf_costmap_core::CostmapPlanner::Ptr & | planner_ptr, | ||
| const CostmapWrapper::Ptr & | costmap_ptr, | ||
| const MoveBaseFlexConfig & | config | ||
| ) |
Constructor.
- Parameters
-
planner_name Name of the planner to use. planner_ptr Shared pointer to the plugin to use. costmap_ptr Shared pointer to the global costmap. config Current server configuration (dynamic).
Definition at line 47 of file costmap_planner_execution.cpp.
|
virtual |
Destructor.
Definition at line 59 of file costmap_planner_execution.cpp.
Member Function Documentation
|
privatevirtual |
Calls the planner plugin to make a plan from the start pose to the goal pose with the given tolerance, if a goal tolerance is enabled in the planner plugin.
- Parameters
-
start The start pose for planning goal The goal pose for planning tolerance The goal tolerance plan The computed plan by the plugin cost The computed costs for the corresponding plan message An optional message which should correspond with the returned outcome
- Returns
- An outcome number, see also the action definition in the GetPath.action file
Reimplemented from mbf_abstract_nav::AbstractPlannerExecution.
Definition at line 73 of file costmap_planner_execution.cpp.
|
inlineprivatevirtual |
Implementation-specific cleanup function, called right after execution. This method overrides abstract execution empty implementation with underlying map-specific cleanup code.
Reimplemented from mbf_abstract_nav::AbstractExecutionBase.
Definition at line 97 of file costmap_planner_execution.h.
|
inlineprivatevirtual |
Implementation-specific setup function, called right before execution. This method overrides abstract execution empty implementation with underlying map-specific setup code.
Reimplemented from mbf_abstract_nav::AbstractExecutionBase.
Definition at line 88 of file costmap_planner_execution.h.
|
private |
Definition at line 63 of file costmap_planner_execution.cpp.
Member Data Documentation
|
private |
Shared pointer to the global planner costmap.
Definition at line 124 of file costmap_planner_execution.h.
|
private |
Whether to lock costmap before calling the planner (see issue #4 for details)
Definition at line 127 of file costmap_planner_execution.h.
|
private |
Name of the planner assigned by the class loader.
Definition at line 130 of file costmap_planner_execution.h.
The documentation for this class was generated from the following files: