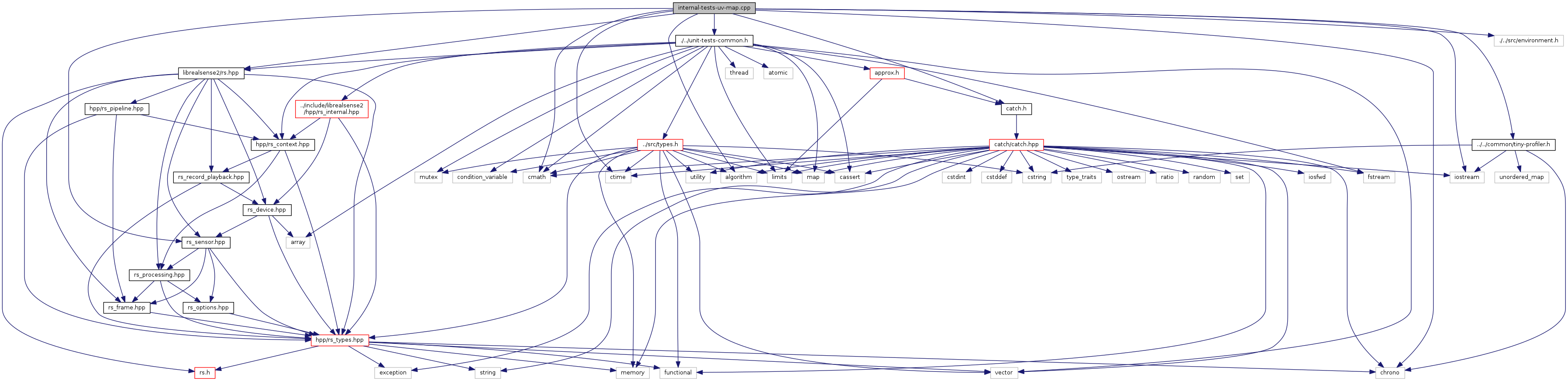
#include "catch.h"#include <cmath>#include <iostream>#include <chrono>#include <ctime>#include <algorithm>#include <librealsense2/rs.hpp>#include <librealsense2/hpp/rs_sensor.hpp>#include "../../common/tiny-profiler.h"#include "./../unit-tests-common.h"#include "./../src/environment.h"
Include dependency graph for internal-tests-uv-map.cpp:
Go to the source code of this file.
Functions | |
| TEST_CASE ("Generate UV-MAP","[live]") | |
Variables | |
| std::vector< device_profiles > | uv_tests_configurations |
Function Documentation
| TEST_CASE | ( | "Generate UV-MAP" | , |
| "" | [live] | ||
| ) |
Definition at line 34 of file internal-tests-uv-map.cpp.
Variable Documentation
| std::vector<device_profiles> uv_tests_configurations |
Initial value:
= {
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 1024, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 2000, 1500, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 720, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 2000, 1500, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 960, 768, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 2000, 1500, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 1024, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 1920, 1080, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 720, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 1920, 1080, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 960, 768, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 1920, 1080, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 1024, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 960, 720, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 1280, 720, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 960, 720, 0 } }, 30, true },
{ { { RS2_STREAM_DEPTH, RS2_FORMAT_Z16, 960, 768, 0 },{ RS2_STREAM_COLOR, RS2_FORMAT_YUYV, 960, 720, 0 } }, 30, true },
}
Definition: rs_sensor.h:62
Definition: rs_sensor.h:65
Definition: rs_sensor.h:46
Definition: rs_sensor.h:45
Definition at line 19 of file internal-tests-uv-map.cpp.