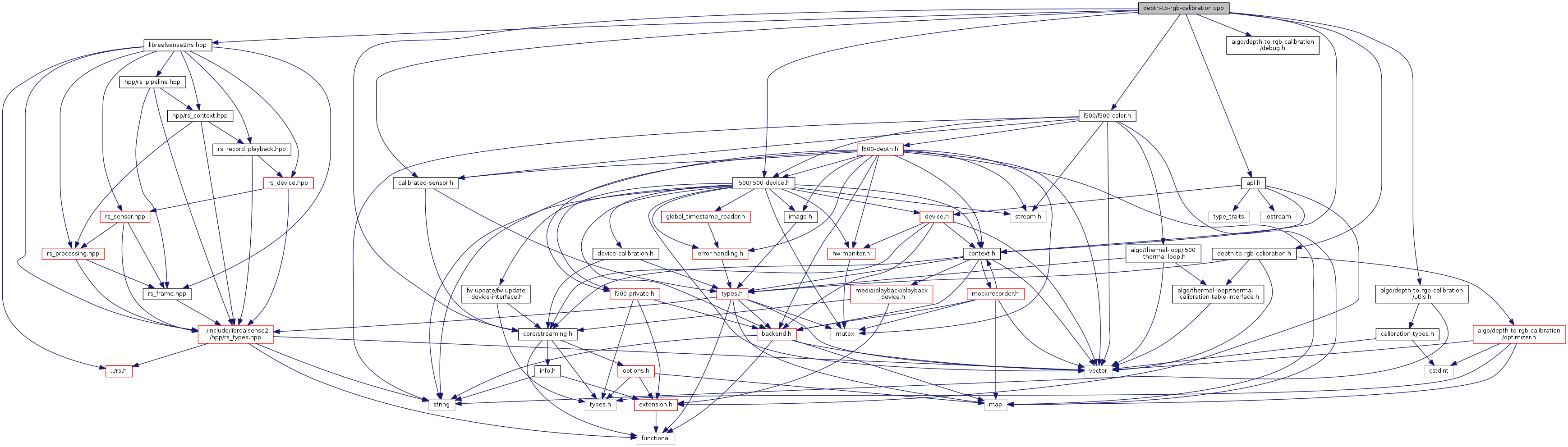
#include "depth-to-rgb-calibration.h"#include <librealsense2/rs.hpp>#include "core/streaming.h"#include "calibrated-sensor.h"#include "context.h"#include "api.h"#include "algo/depth-to-rgb-calibration/debug.h"#include "l500/l500-device.h"#include "l500/l500-color.h"#include "algo/depth-to-rgb-calibration/utils.h"
Include dependency graph for depth-to-rgb-calibration.cpp:
Go to the source code of this file.
Macros | |
| #define | CHECK_IF_NEEDS_TO_STOP() if (_should_continue) _should_continue() |
| #define | DISABLE_RS2_CALIBRATION_CHECKS "RS2_AC_DISABLE_RETRIES" |
Macro Definition Documentation
| #define CHECK_IF_NEEDS_TO_STOP | ( | ) | if (_should_continue) _should_continue() |
Definition at line 19 of file depth-to-rgb-calibration.cpp.
| #define DISABLE_RS2_CALIBRATION_CHECKS "RS2_AC_DISABLE_RETRIES" |