#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>#include "freenect_internal.h"#include "registration.h"#include "cameras.h"#include "flags.h"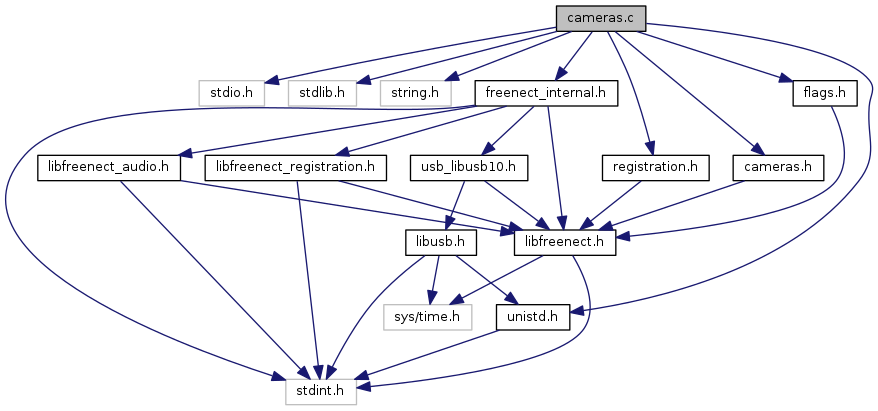
Go to the source code of this file.
Classes | |
| struct | pkt_hdr |
Macros | |
| #define | CLAMP(x) if (x < 0) {x = 0;} if (x > 255) {x = 255;} |
| #define | depth_mode_count 6 |
| #define | MAKE_RESERVED(res, fmt) (uint32_t)(((res & 0xff) << 8) | (((fmt & 0xff)))) |
| #define | RESERVED_TO_FORMAT(reserved) ((reserved) & 0xff) |
| #define | RESERVED_TO_RESOLUTION(reserved) (freenect_resolution)((reserved >> 8) & 0xff) |
| #define | video_mode_count 12 |
Variables | |
| static const freenect_frame_mode | invalid_mode = {0, (freenect_resolution)0, {(freenect_video_format)0}, 0, 0, 0, 0, 0, 0, 0} |
| static freenect_frame_mode | supported_depth_modes [depth_mode_count] |
| static freenect_frame_mode | supported_video_modes [video_mode_count] |
Macro Definition Documentation
| #define CLAMP | ( | x | ) | if (x < 0) {x = 0;} if (x > 255) {x = 255;} |
| #define MAKE_RESERVED | ( | res, | |
| fmt | |||
| ) | (uint32_t)(((res & 0xff) << 8) | (((fmt & 0xff)))) |
| #define RESERVED_TO_RESOLUTION | ( | reserved | ) | (freenect_resolution)((reserved >> 8) & 0xff) |
Function Documentation
|
static |
Convert a packed array of n elements with vw useful bits into array of zero-padded 16bit elements.
- Parameters
-
src The source packed array, of size (n * vw / 8) bytes dest The destination unpacked array, of size (n * 2) bytes vw The virtual width of elements, that is the number of useful bits for each of them n The number of elements (in particular, of the destination array), NOT a length in bytes
Convert a packed array of n elements with vw useful bits into array of 8bit elements, dropping LSB.
- Parameters
-
src The source packed array, of size (n * vw / 8) bytes dest The destination unpacked array, of size (n * 2) bytes vw The virtual width of elements, that is the number of useful bits for each of them n The number of elements (in particular, of the destination array), NOT a length in bytes
- Precondition
- vw is expected to be >= 8.
|
static |
|
static |
| FN_INTERNAL int freenect_camera_init | ( | freenect_device * | dev | ) |
| FN_INTERNAL int freenect_camera_teardown | ( | freenect_device * | dev | ) |
|
static |
|
static |
|
static |
|
static |
| freenect_frame_mode freenect_find_depth_mode | ( | freenect_resolution | res, |
| freenect_depth_format | fmt | ||
| ) |
Convenience function to return a mode descriptor matching the specified resolution and depth camera pixel format, if one exists.
- Parameters
-
res Resolution desired fmt Pixel format desired
- Returns
- A freenect_frame_mode that matches the arguments specified, if such a valid mode exists; otherwise, an invalid freenect_frame_mode.
| freenect_frame_mode freenect_find_video_mode | ( | freenect_resolution | res, |
| freenect_video_format | fmt | ||
| ) |
Convenience function to return a mode descriptor matching the specified resolution and video camera pixel format, if one exists.
- Parameters
-
res Resolution desired fmt Pixel format desired
- Returns
- A freenect_frame_mode that matches the arguments specified, if such a valid mode exists; otherwise, an invalid freenect_frame_mode.
| freenect_frame_mode freenect_get_current_depth_mode | ( | freenect_device * | dev | ) |
Get the frame descriptor of the current depth mode for the specified freenect device.
- Parameters
-
dev Which device to return the currently-set depth mode for
- Returns
- A freenect_frame_mode describing the current depth mode of the specified device
| freenect_frame_mode freenect_get_current_video_mode | ( | freenect_device * | dev | ) |
Get the frame descriptor of the current video mode for the specified freenect device.
- Parameters
-
dev Which device to return the currently-set video mode for
- Returns
- A freenect_frame_mode describing the current video mode of the specified device
| freenect_frame_mode freenect_get_depth_mode | ( | int | mode_num | ) |
Get the frame descriptor of the nth supported depth mode for the depth camera.
- Parameters
-
mode_num Which of the supported modes to return information about
- Returns
- A freenect_frame_mode describing the nth depth mode
| int freenect_get_depth_mode_count | ( | ) |
| freenect_frame_mode freenect_get_video_mode | ( | int | mode_num | ) |
Get the frame descriptor of the nth supported video mode for the video camera.
- Parameters
-
mode_num Which of the supported modes to return information about
- Returns
- A freenect_frame_mode describing the nth video mode
| int freenect_get_video_mode_count | ( | ) |
| int freenect_set_depth_buffer | ( | freenect_device * | dev, |
| void * | buf | ||
| ) |
Set the buffer to store depth information to. Size of buffer is dependant on depth format. See FREENECT_DEPTH_*_SIZE defines for more information.
- Parameters
-
dev Device to set depth buffer for. buf Buffer to store depth information to.
- Returns
- 0 on success, < 0 on error
| void freenect_set_depth_callback | ( | freenect_device * | dev, |
| freenect_depth_cb | cb | ||
| ) |
| void freenect_set_depth_chunk_callback | ( | freenect_device * | dev, |
| freenect_chunk_cb | cb | ||
| ) |
| int freenect_set_depth_mode | ( | freenect_device * | dev, |
| const freenect_frame_mode | mode | ||
| ) |
| int freenect_set_video_buffer | ( | freenect_device * | dev, |
| void * | buf | ||
| ) |
Set the buffer to store depth information to. Size of buffer is dependant on video format. See FREENECT_VIDEO_*_SIZE defines for more information.
- Parameters
-
dev Device to set video buffer for. buf Buffer to store video information to.
- Returns
- 0 on success, < 0 on error
| void freenect_set_video_callback | ( | freenect_device * | dev, |
| freenect_video_cb | cb | ||
| ) |
| void freenect_set_video_chunk_callback | ( | freenect_device * | dev, |
| freenect_chunk_cb | cb | ||
| ) |
| int freenect_set_video_mode | ( | freenect_device * | dev, |
| freenect_frame_mode | mode | ||
| ) |
Sets the current video mode for the specified device. If the freenect_frame_mode specified is not one provided by the driver e.g. from freenect_get_video_mode() or freenect_find_video_mode() then behavior is undefined. The current video mode cannot be changed while streaming is active.
- Parameters
-
dev Device for which to set the video mode mode Frame mode to set
- Returns
- 0 on success, < 0 if error
| int freenect_start_depth | ( | freenect_device * | dev | ) |
| int freenect_start_video | ( | freenect_device * | dev | ) |
| int freenect_stop_depth | ( | freenect_device * | dev | ) |
| int freenect_stop_video | ( | freenect_device * | dev | ) |
|
static |
|
static |
|
static |
|
static |
|
static |
Variable Documentation
|
static |
|
static |
|
static |