Helper base class template for closed loop HardwareInterfaceAdapter implementations. More...
#include <hardware_interface_adapter.h>
Public Member Functions | |
| ClosedLoopHardwareInterfaceAdapter () | |
| bool | init (std::vector< hardware_interface::JointHandle > &joint_handles, ros::NodeHandle &controller_nh) |
| void | starting (const ros::Time &) |
| void | stopping (const ros::Time &) |
| void | updateCommand (const ros::Time &, const ros::Duration &period, const State &desired_state, const State &state_error) |
Private Types | |
| typedef boost::shared_ptr< control_toolbox::Pid > | PidPtr |
Private Attributes | |
| std::vector< hardware_interface::JointHandle > * | joint_handles_ptr_ |
| std::vector< PidPtr > | pids_ |
| std::vector< double > | velocity_ff_ |
Detailed Description
template<class State>
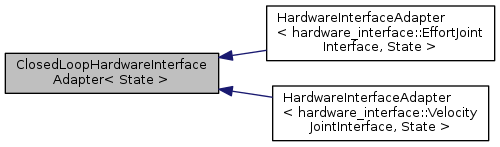
class ClosedLoopHardwareInterfaceAdapter< State >
Helper base class template for closed loop HardwareInterfaceAdapter implementations.
Adapters leveraging (specializing) this class will generate a command given the desired state and state error using a velocity feedforward term plus a corrective PID term.
Use one of the available template specializations of this class (or create your own) to adapt the JointTrajectoryController to a specidfic hardware interface.
Definition at line 145 of file hardware_interface_adapter.h.
Member Typedef Documentation
|
private |
Definition at line 217 of file hardware_interface_adapter.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 148 of file hardware_interface_adapter.h.
Member Function Documentation
|
inline |
Definition at line 150 of file hardware_interface_adapter.h.
|
inline |
Definition at line 181 of file hardware_interface_adapter.h.
|
inline |
Definition at line 193 of file hardware_interface_adapter.h.
|
inline |
Definition at line 195 of file hardware_interface_adapter.h.
Member Data Documentation
|
private |
Definition at line 222 of file hardware_interface_adapter.h.
|
private |
Definition at line 218 of file hardware_interface_adapter.h.
|
private |
Definition at line 220 of file hardware_interface_adapter.h.
The documentation for this class was generated from the following file: