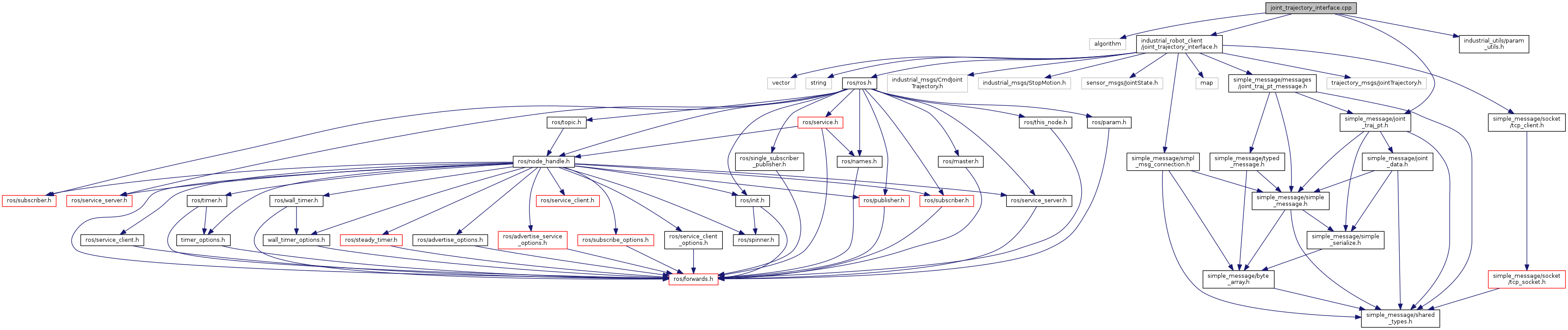
#include <algorithm>#include "industrial_robot_client/joint_trajectory_interface.h"#include "simple_message/joint_traj_pt.h"#include "industrial_utils/param_utils.h"
Include dependency graph for joint_trajectory_interface.cpp:
Go to the source code of this file.
Namespaces | |
| industrial_robot_client | |
| industrial_robot_client::joint_trajectory_interface | |
Macros | |
| #define | ROS_ERROR_RETURN(rtn, ...) do {ROS_ERROR(__VA_ARGS__); return(rtn);} while(0) |
Typedefs | |
| typedef industrial::joint_traj_pt::JointTrajPt | rbt_JointTrajPt |
| typedef trajectory_msgs::JointTrajectoryPoint | ros_JointTrajPt |
Macro Definition Documentation
| #define ROS_ERROR_RETURN | ( | rtn, | |
| ... | |||
| ) | do {ROS_ERROR(__VA_ARGS__); return(rtn);} while(0) |
Definition at line 49 of file joint_trajectory_interface.cpp.
Typedef Documentation
Definition at line 41 of file joint_trajectory_interface.cpp.
| typedef trajectory_msgs::JointTrajectoryPoint ros_JointTrajPt |
Definition at line 42 of file joint_trajectory_interface.cpp.