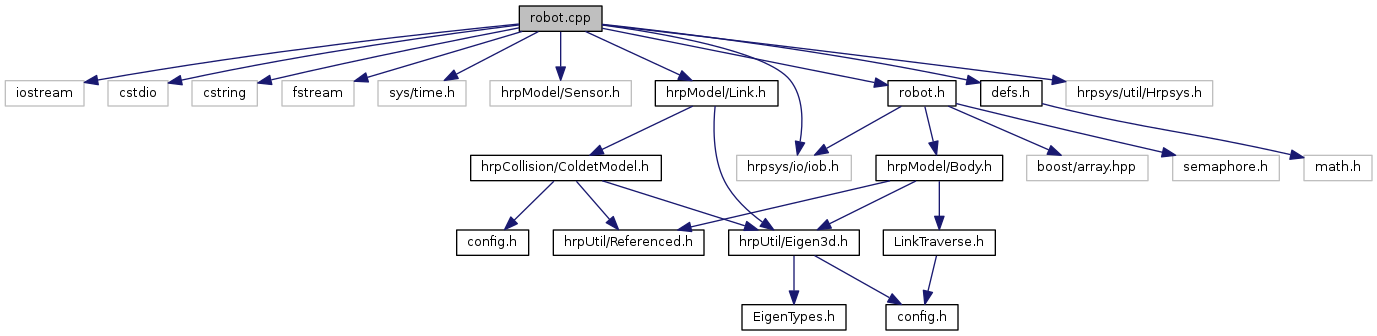
#include <iostream>#include <cstdio>#include <cstring>#include <fstream>#include <sys/time.h>#include <hrpModel/Sensor.h>#include <hrpModel/Link.h>#include "defs.h"#include "hrpsys/io/iob.h"#include "robot.h"#include "hrpsys/util/Hrpsys.h"
Include dependency graph for RobotHardware/robot.cpp:
Go to the source code of this file.
Macros | |
| #define | CALIB_COUNT (10*200) |
| #define | DEFAULT_ANGLE_ERROR_LIMIT 0.2 |
| #define | DEFAULT_MAX_ZMP_ERROR 0.03 |
| #define | GAIN_COUNT ( 5*200) |
Functions | |
| char * | time_string () |
Macro Definition Documentation
| #define CALIB_COUNT (10*200) |
Definition at line 13 of file RobotHardware/robot.cpp.
| #define DEFAULT_ANGLE_ERROR_LIMIT 0.2 |
Definition at line 17 of file RobotHardware/robot.cpp.
| #define DEFAULT_MAX_ZMP_ERROR 0.03 |
Definition at line 16 of file RobotHardware/robot.cpp.
| #define GAIN_COUNT ( 5*200) |
Definition at line 14 of file RobotHardware/robot.cpp.
Function Documentation
| char* time_string | ( | ) |
Definition at line 612 of file RobotHardware/robot.cpp.