Standalone component. More...
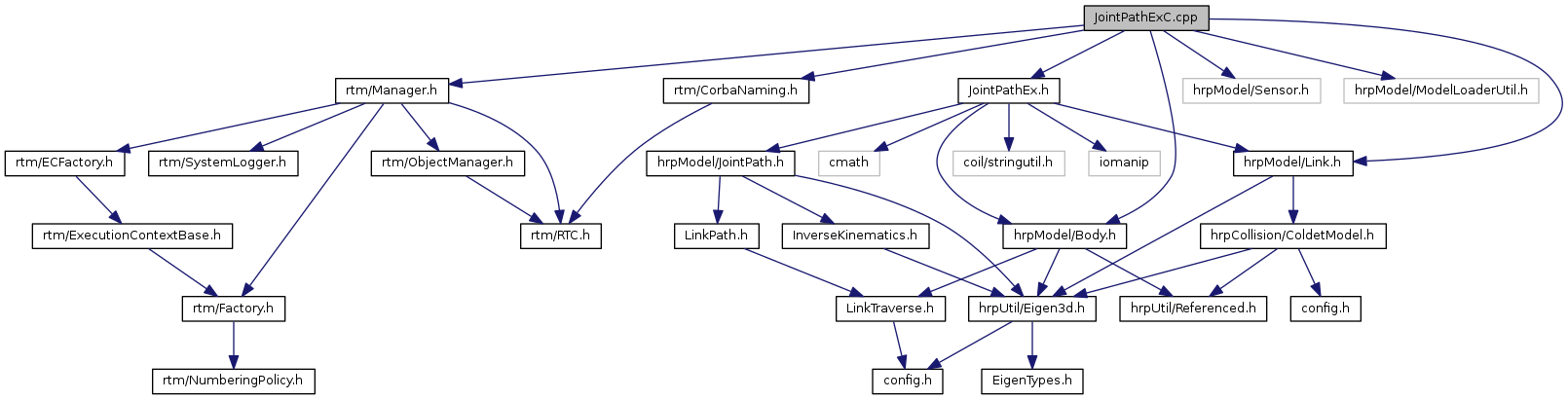
#include <rtm/Manager.h>#include <rtm/CorbaNaming.h>#include <hrpModel/Body.h>#include <hrpModel/Link.h>#include <hrpModel/Sensor.h>#include <hrpModel/ModelLoaderUtil.h>#include "JointPathEx.h"
Include dependency graph for JointPathExC.cpp:
Go to the source code of this file.
Functions | |
| int | _calcInverseKinematics2Loop (double *_vel_p, double *_vel_r) |
| int | _getJointAngles (double *ja) |
| int | _setJointAngles (double *ja) |
| int | initializeJointPathExInstance (char *root_link_name, char *target_link_name) |
| int | initializeOpenHRPModel (char *_filename) |
| hrp::BodyPtr | m_robot (new hrp::Body()) |
| static std::string | print_prefix ("[jpe]") |
Variables | |
| hrp::JointPathExPtr | jpe |
Detailed Description
Function Documentation
| int _calcInverseKinematics2Loop | ( | double * | _vel_p, |
| double * | _vel_r | ||
| ) |
Definition at line 84 of file JointPathExC.cpp.
| int _getJointAngles | ( | double * | ja | ) |
Definition at line 75 of file JointPathExC.cpp.
| int _setJointAngles | ( | double * | ja | ) |
Definition at line 66 of file JointPathExC.cpp.
| int initializeJointPathExInstance | ( | char * | root_link_name, |
| char * | target_link_name | ||
| ) |
Definition at line 55 of file JointPathExC.cpp.
| int initializeOpenHRPModel | ( | char * | _filename | ) |
Definition at line 24 of file JointPathExC.cpp.
| hrp::BodyPtr m_robot | ( | new | hrp::Body() | ) |
|
static |
Variable Documentation
Definition at line 20 of file JointPathExC.cpp.