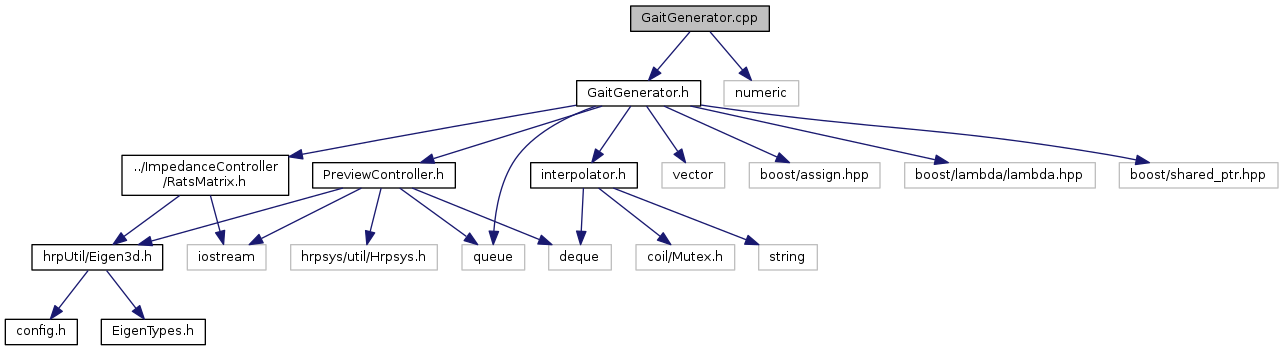
#include "GaitGenerator.h"
#include <numeric>
Go to the source code of this file.
|
| void | rats::cycloid_midpoint (hrp::Vector3 &ret, const double ratio, const hrp::Vector3 &start, const hrp::Vector3 &goal, const double height, const double default_top_ratio) |
| |
| std::string | rats::leg_type_to_leg_type_string (const leg_type l_r) |
| |
| void | rats::multi_mid_coords (coordinates &ret, const std::vector< coordinates > &cs, const double eps) |
| |
| double | rats::set_value_according_to_toe_heel_type (const toe_heel_type tht, const double toe_value, const double heel_value, const double default_value) |
| |
| #define deg2rad |
( |
|
deg | ) |
(deg * M_PI / 180) |
| #define rad2deg |
( |
|
rad | ) |
(rad * 180 / M_PI) |