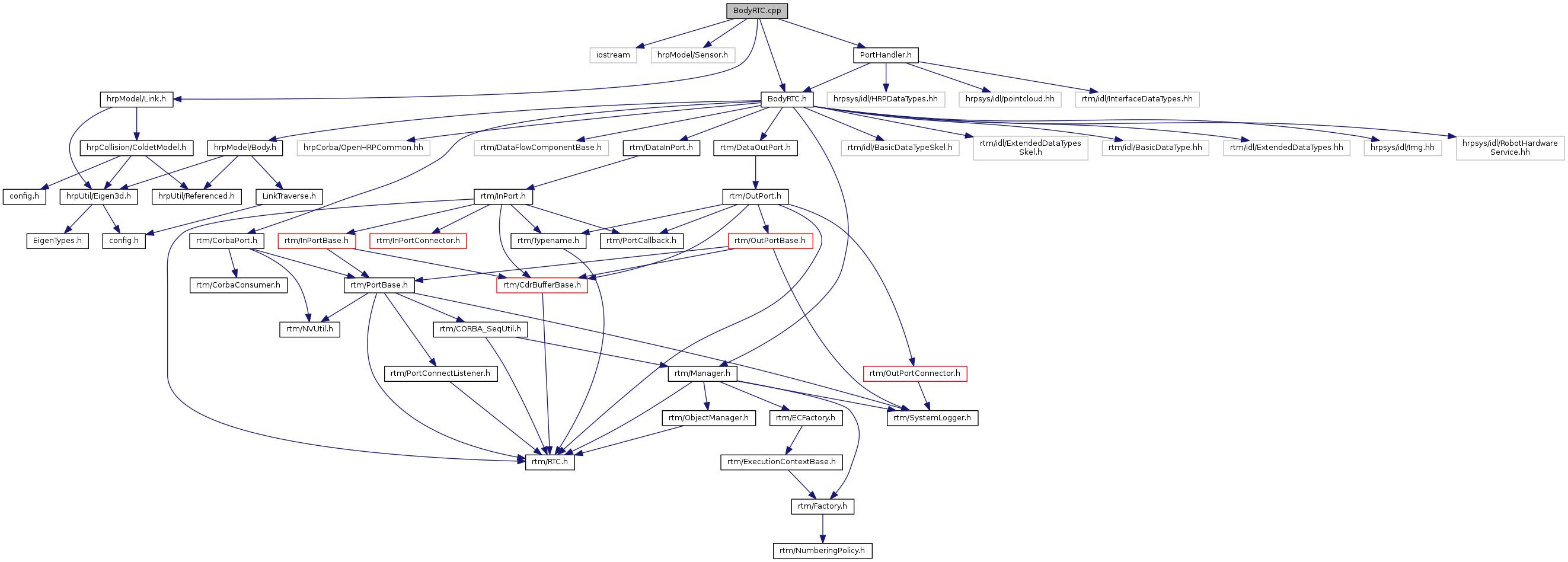
#include <iostream>#include <hrpModel/Sensor.h>#include <hrpModel/Link.h>#include "BodyRTC.h"#include "PortHandler.h"
Include dependency graph for BodyRTC.cpp:
Go to the source code of this file.
Macros | |
| #define | DEFAULT_ANGLE_ERROR_LIMIT 0.2 |
| #define | JID_ALL -1 |
| #define | JID_INVALID -2 |
| #define | OFF 0 |
| #define | ON 1 |
Functions | |
| template<class _Delete > | |
| void | DummyDelete (RTC::RTObject_impl *rtc) |
| bool | getJointList (hrp::Body *body, const std::vector< std::string > &elements, std::vector< hrp::Link * > &joints) |
| void | parsePortConfig (const std::string &config, std::string &name, std::string &type, std::vector< std::string > &elements) |
| char * | time_string () |
Macro Definition Documentation
| #define DEFAULT_ANGLE_ERROR_LIMIT 0.2 |
Definition at line 64 of file BodyRTC.cpp.
| #define JID_ALL -1 |
Definition at line 602 of file BodyRTC.cpp.
| #define JID_INVALID -2 |
Definition at line 603 of file BodyRTC.cpp.
| #define OFF 0 |
Definition at line 493 of file BodyRTC.cpp.
| #define ON 1 |
Definition at line 492 of file BodyRTC.cpp.
Function Documentation
template<class _Delete >
| void DummyDelete | ( | RTC::RTObject_impl * | rtc | ) |
Definition at line 727 of file BodyRTC.cpp.
| bool getJointList | ( | hrp::Body * | body, |
| const std::vector< std::string > & | elements, | ||
| std::vector< hrp::Link * > & | joints | ||
| ) |
Definition at line 118 of file BodyRTC.cpp.
| void parsePortConfig | ( | const std::string & | config, |
| std::string & | name, | ||
| std::string & | type, | ||
| std::vector< std::string > & | elements | ||
| ) |
Definition at line 85 of file BodyRTC.cpp.
| char* time_string | ( | ) |
Definition at line 482 of file BodyRTC.cpp.