#include <hector_pose_estimation/matrix_config.h>#include <hector_pose_estimation/Eigen/MatrixBaseAddons.h>#include <hector_pose_estimation/Eigen/QuaternionBaseAddons.h>#include <Eigen/Core>#include <Eigen/Geometry>#include <stdexcept>
Include dependency graph for matrix.h:

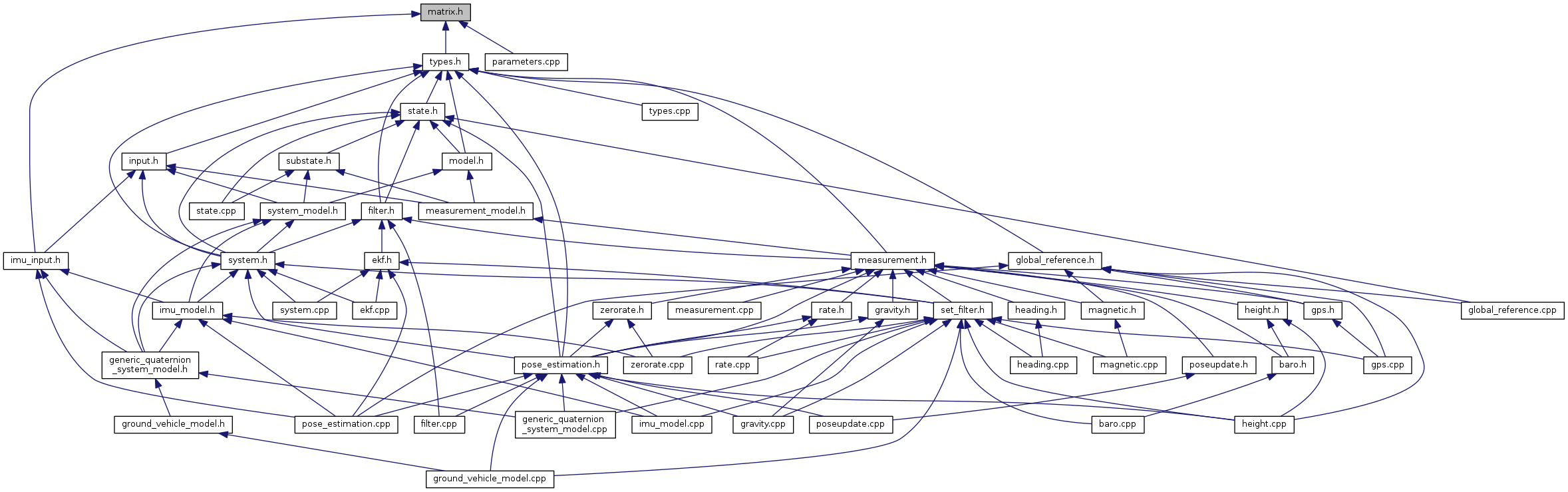
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| Eigen | |
| hector_pose_estimation | |
Typedefs | |
| typedef ColumnVector_< Dynamic >::type | hector_pose_estimation::ColumnVector |
| typedef ColumnVector_< 3 >::type | hector_pose_estimation::ColumnVector3 |
| typedef VectorBlock< const ColumnVector, 3 > | hector_pose_estimation::ConstVectorBlock3 |
| typedef VectorBlock< const ColumnVector, 4 > | hector_pose_estimation::ConstVectorBlock4 |
| typedef Eigen::DenseIndex | hector_pose_estimation::IndexType |
| typedef Matrix_< Dynamic, Dynamic >::type | hector_pose_estimation::Matrix |
| typedef Matrix_< 3, 3 >::type | hector_pose_estimation::Matrix3 |
| typedef Eigen::Block< Matrix, Dynamic, Dynamic > | hector_pose_estimation::MatrixBlock |
| typedef Eigen::Quaternion< ScalarType > | hector_pose_estimation::Quaternion |
| typedef RowVector_< Dynamic >::type | hector_pose_estimation::RowVector |
| typedef RowVector_< 3 >::type | hector_pose_estimation::RowVector3 |
| typedef double | hector_pose_estimation::ScalarType |
| typedef SymmetricMatrix_< Dynamic >::type | hector_pose_estimation::SymmetricMatrix |
| typedef SymmetricMatrix_< 3 >::type | hector_pose_estimation::SymmetricMatrix3 |
| typedef SymmetricMatrix_< 6 >::type | hector_pose_estimation::SymmetricMatrix6 |
| typedef VectorBlock< ColumnVector, 3 > | hector_pose_estimation::VectorBlock3 |
| typedef VectorBlock< ColumnVector, 4 > | hector_pose_estimation::VectorBlock4 |
Functions | |
| template<typename OtherDerived > | |
| static Matrix3 | hector_pose_estimation::SkewSymmetricMatrix (const Eigen::MatrixBase< OtherDerived > &other) |