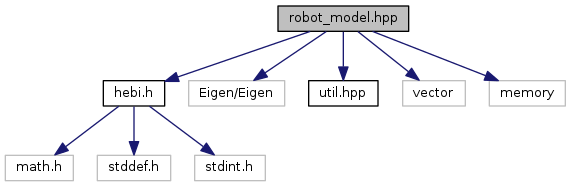
Include dependency graph for robot_model.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | hebi::robot_model::EndEffectorPositionObjective |
| class | hebi::robot_model::EndEffectorSO3Objective |
| class | hebi::robot_model::EndEffectorTipAxisObjective |
| struct | hebi::robot_model::IKResult |
| class | hebi::robot_model::JointLimitConstraint |
| class | hebi::robot_model::Objective |
| class | hebi::robot_model::RobotModel |
| Represents a chain or tree of robot elements (rigid bodies and joints). More... | |
Namespaces | |
| hebi | |
| hebi::robot_model | |
Typedefs | |
| using | hebi::robot_model::Matrix4dVector = std::vector< Matrix4d, Eigen::aligned_allocator< Eigen::Matrix4d > > |
| using | hebi::robot_model::MatrixXdVector = std::vector< MatrixXd, Eigen::aligned_allocator< Eigen::MatrixXd > > |