Unit tests for Rot3 class - common between Matrix and Quaternion. More...
#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/base/testLie.h>#include <gtsam/base/Testable.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/base/lieProxies.h>#include <boost/math/constants/constants.hpp>#include <CppUnitLite/TestHarness.h>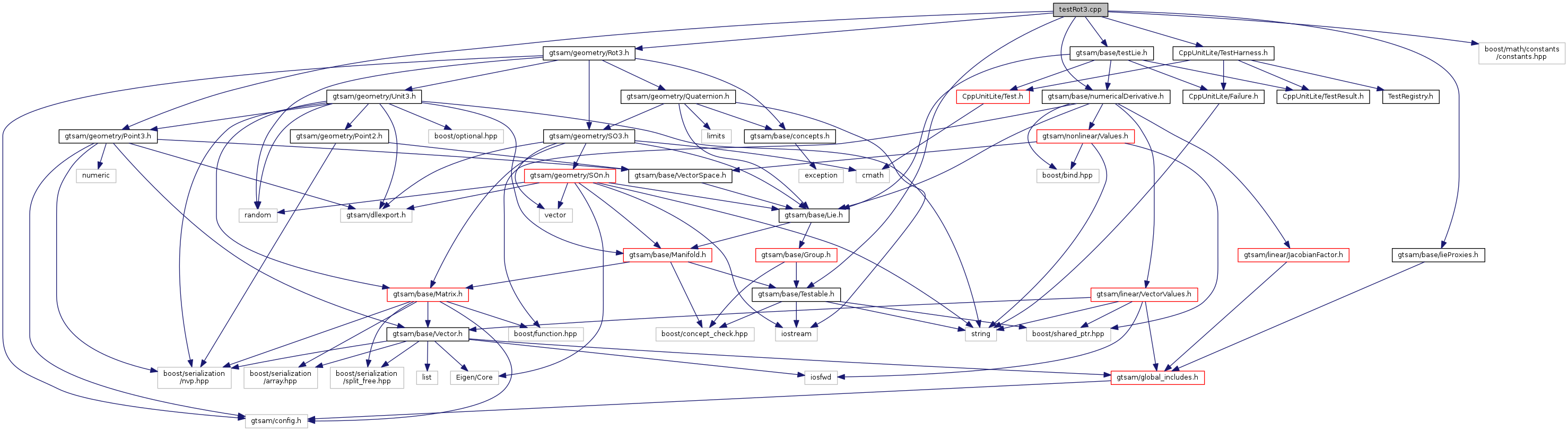
Go to the source code of this file.
Classes | |
| class | AngularVelocity |
Macros | |
| #define | CHECK_AXIS_ANGLE(expectedAxis, expectedAngle, rotation) |
| #define | CHECK_OMEGA(X, Y, Z) |
| #define | CHECK_OMEGA_ZERO(X, Y, Z) |
Functions | |
| AngularVelocity | bracket (const AngularVelocity &X, const AngularVelocity &Y) |
| Matrix | Cayley (const Matrix &A) |
| int | main () |
| static Point3 | P (0.2, 0.7,-2.0) |
| double | pitch_proxy (Rot3 const &R) |
| double | roll_proxy (Rot3 const &R) |
| Vector3 | rpy_proxy (Rot3 const &R) |
| Vector3 | RQ_proxy (Matrix3 const &R) |
| Rot3 | RzRyRx_proxy (double const &a, double const &b, double const &c) |
| Rot3 | RzRyRx_proxy (Vector3 const &xyz) |
| Rot3 | slow_but_correct_Rodrigues (const Vector &w) |
| TEST (Rot3, Concept) | |
| TEST (Rot3, chart) | |
| TEST (Rot3, constructor) | |
| TEST (Rot3, constructor2) | |
| TEST (Rot3, constructor3) | |
| TEST (Rot3, transpose) | |
| TEST (Rot3, equals) | |
| TEST (Rot3, AxisAngle) | |
| TEST (Rot3, Rodrigues) | |
| TEST (Rot3, Rodrigues2) | |
| TEST (Rot3, Rodrigues3) | |
| TEST (Rot3, Rodrigues4) | |
| TEST (Rot3, retract) | |
| TEST (Rot3, log) | |
| TEST (Rot3, retract_localCoordinates) | |
| TEST (Rot3, expmap_logmap) | |
| TEST (Rot3, retract_localCoordinates2) | |
| TEST (Rot3, manifold_expmap) | |
| TEST (Rot3, BCH) | |
| TEST (Rot3, rotate_derivatives) | |
| TEST (Rot3, unrotate) | |
| TEST (Rot3, compose) | |
| TEST (Rot3, inverse) | |
| TEST (Rot3, between) | |
| TEST (Rot3, xyz) | |
| TEST (Rot3, yaw_pitch_roll) | |
| TEST (Rot3, RQ) | |
| TEST (Rot3, expmapStability) | |
| TEST (Rot3, logmapStability) | |
| TEST (Rot3, quaternion) | |
| TEST (Rot3, Cayley) | |
| TEST (Rot3, stream) | |
| TEST (Rot3, slerp) | |
| TEST (Rot3, Invariants) | |
| TEST (Rot3, LieGroupDerivatives) | |
| TEST (Rot3, ChartDerivatives) | |
| TEST (Rot3, ClosestTo) | |
| TEST (Rot3, axisAngle) | |
| TEST (Rot3, RzRyRx_scalars_derivative) | |
| TEST (Rot3, RzRyRx_vector_derivative) | |
| TEST (Rot3, Ypr_derivative) | |
| TEST (Rot3, RQ_derivative) | |
| TEST (Rot3, xyz_derivative) | |
| TEST (Rot3, ypr_derivative) | |
| TEST (Rot3, rpy_derivative) | |
| TEST (Rot3, roll_derivative) | |
| TEST (Rot3, pitch_derivative) | |
| TEST (Rot3, yaw_derivative) | |
| TEST (Rot3, determinant) | |
| Vector3 | xyz_proxy (Rot3 const &R) |
| double | yaw_proxy (Rot3 const &R) |
| Rot3 | Ypr_proxy (double const &y, double const &p, double const &r) |
| Vector3 | ypr_proxy (Rot3 const &R) |
Variables | |
| static double | epsilon = 0.001 |
| static double | error = 1e-9 |
| static Rot3 | R = Rot3::Rodrigues(0.1, 0.4, 0.2) |
| Rot3 | T1 (Rot3::AxisAngle(Vector3(0, 0, 1), 1)) |
| Rot3 | T2 (Rot3::AxisAngle(Vector3(0, 1, 0), 2)) |
Detailed Description
Unit tests for Rot3 class - common between Matrix and Quaternion.
Unit tests for Rot3Q class.
Unit tests for Rot3 class, Quaternion specific.
Definition in file testRot3.cpp.
Macro Definition Documentation
| #define CHECK_AXIS_ANGLE | ( | expectedAxis, | |
| expectedAngle, | |||
| rotation | |||
| ) |
Function Documentation
| AngularVelocity bracket | ( | const AngularVelocity & | X, |
| const AngularVelocity & | Y | ||
| ) |
Definition at line 326 of file testRot3.cpp.
Definition at line 592 of file testRot3.cpp.
| int main | ( | void | ) |
Definition at line 934 of file testRot3.cpp.
|
static |
| double pitch_proxy | ( | Rot3 const & | R | ) |
Definition at line 888 of file testRot3.cpp.
| double roll_proxy | ( | Rot3 const & | R | ) |
Definition at line 875 of file testRot3.cpp.
Definition at line 862 of file testRot3.cpp.
| Vector3 RQ_proxy | ( | Matrix3 const & | R | ) |
Definition at line 798 of file testRot3.cpp.
| Rot3 RzRyRx_proxy | ( | double const & | a, |
| double const & | b, | ||
| double const & | c | ||
| ) |
Definition at line 747 of file testRot3.cpp.
Definition at line 766 of file testRot3.cpp.
Definition at line 99 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Concept | |||
| ) |
Definition at line 42 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| chart | |||
| ) |
Definition at line 49 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| constructor | |||
| ) |
Definition at line 56 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| constructor2 | |||
| ) |
Definition at line 65 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| constructor3 | |||
| ) |
Definition at line 74 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| transpose | |||
| ) |
Definition at line 82 of file testRot3.cpp.
Definition at line 90 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| AxisAngle | |||
| ) |
Definition at line 108 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Rodrigues | |||
| ) |
Definition at line 126 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Rodrigues2 | |||
| ) |
Definition at line 135 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Rodrigues3 | |||
| ) |
Definition at line 149 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Rodrigues4 | |||
| ) |
Definition at line 158 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| retract | |||
| ) |
Definition at line 172 of file testRot3.cpp.
Definition at line 184 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| retract_localCoordinates | |||
| ) |
Definition at line 262 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| expmap_logmap | |||
| ) |
Definition at line 269 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| retract_localCoordinates2 | |||
| ) |
Definition at line 277 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| manifold_expmap | |||
| ) |
Definition at line 287 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| BCH | |||
| ) |
Definition at line 331 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| rotate_derivatives | |||
| ) |
Definition at line 344 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| unrotate | |||
| ) |
Definition at line 358 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| compose | |||
| ) |
Definition at line 373 of file testRot3.cpp.
Definition at line 393 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| between | |||
| ) |
Definition at line 409 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| xyz | |||
| ) |
Definition at line 441 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| yaw_pitch_roll | |||
| ) |
Definition at line 472 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| RQ | |||
| ) |
Definition at line 493 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| expmapStability | |||
| ) |
Definition at line 525 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| logmapStability | |||
| ) |
Definition at line 541 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| quaternion | |||
| ) |
Definition at line 554 of file testRot3.cpp.
Definition at line 598 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| stream | |||
| ) |
Definition at line 606 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| slerp | |||
| ) |
Definition at line 616 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Invariants | |||
| ) |
Definition at line 632 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 649 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| ChartDerivatives | |||
| ) |
Definition at line 660 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| ClosestTo | |||
| ) |
Definition at line 672 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| axisAngle | |||
| ) |
| TEST | ( | Rot3 | , |
| RzRyRx_scalars_derivative | |||
| ) |
Definition at line 751 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| RzRyRx_vector_derivative | |||
| ) |
Definition at line 768 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| Ypr_derivative | |||
| ) |
Definition at line 783 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| RQ_derivative | |||
| ) |
Definition at line 803 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| xyz_derivative | |||
| ) |
Definition at line 838 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| ypr_derivative | |||
| ) |
Definition at line 851 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| rpy_derivative | |||
| ) |
Definition at line 864 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| roll_derivative | |||
| ) |
Definition at line 877 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| pitch_derivative | |||
| ) |
Definition at line 890 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| yaw_derivative | |||
| ) |
Definition at line 903 of file testRot3.cpp.
| TEST | ( | Rot3 | , |
| determinant | |||
| ) |
Definition at line 914 of file testRot3.cpp.
Definition at line 836 of file testRot3.cpp.
| double yaw_proxy | ( | Rot3 const & | R | ) |
Definition at line 901 of file testRot3.cpp.
| Rot3 Ypr_proxy | ( | double const & | y, |
| double const & | p, | ||
| double const & | r | ||
| ) |
Definition at line 779 of file testRot3.cpp.
Definition at line 849 of file testRot3.cpp.
Variable Documentation
|
static |
Definition at line 39 of file testRot3.cpp.
|
static |
Definition at line 39 of file testRot3.cpp.
|
static |
Definition at line 37 of file testRot3.cpp.