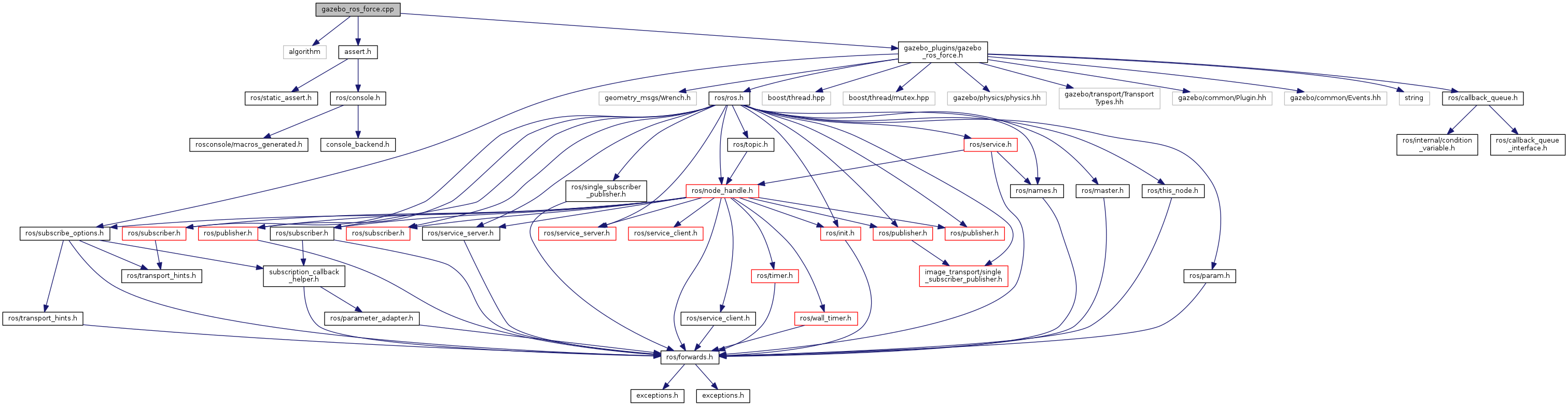
Include dependency graph for gazebo_ros_force.cpp:
Go to the source code of this file.
Namespaces | |
| gazebo | |
Functions | |
| gazebo::GZ_REGISTER_MODEL_PLUGIN (GazeboRosForce) | |
Go to the source code of this file.
Namespaces | |
| gazebo | |
Functions | |
| gazebo::GZ_REGISTER_MODEL_PLUGIN (GazeboRosForce) | |