#include <vector>#include <franka/exception.h>#include <franka/robot.h>#include <ros/console.h>#include <ros/node_handle.h>#include <ros/service_server.h>#include <franka_msgs/SetCartesianImpedance.h>#include <franka_msgs/SetEEFrame.h>#include <franka_msgs/SetForceTorqueCollisionBehavior.h>#include <franka_msgs/SetFullCollisionBehavior.h>#include <franka_msgs/SetJointImpedance.h>#include <franka_msgs/SetKFrame.h>#include <franka_msgs/SetLoad.h>
Include dependency graph for services.h:

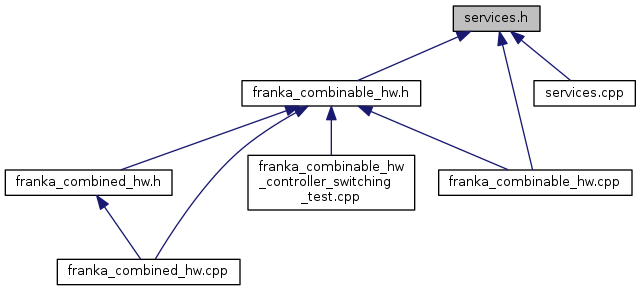
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | franka_hw::ServiceContainer |
| This class serves as container that gathers all possible service interfaces to a libfranka robot instance. More... | |
Namespaces | |
| franka_hw | |
Functions | |
| template<typename T > | |
| ros::ServiceServer | franka_hw::advertiseService (ros::NodeHandle &node_handle, const std::string &name, std::function< void(typename T::Request &, typename T::Response &)> handler) |
| Advertises a service that acts according to the handler function which is used in the service callback. More... | |
| void | franka_hw::setCartesianImpedance (franka::Robot &robot, const franka_msgs::SetCartesianImpedance::Request &req, franka_msgs::SetCartesianImpedance::Response &res) |
| Callback for the service interface to franka::robot::setCartesianImpedance. More... | |
| void | franka_hw::setEEFrame (franka::Robot &robot, const franka_msgs::SetEEFrame::Request &req, franka_msgs::SetEEFrame::Response &res) |
| Callback for the service interface to franka::robot::setEEFrame. More... | |
| void | franka_hw::setForceTorqueCollisionBehavior (franka::Robot &robot, const franka_msgs::SetForceTorqueCollisionBehavior::Request &req, franka_msgs::SetForceTorqueCollisionBehavior::Response &res) |
| Callback for the service interface to franka::robot::setForceTorqueCollisionBehavior. More... | |
| void | franka_hw::setFullCollisionBehavior (franka::Robot &robot, const franka_msgs::SetFullCollisionBehavior::Request &req, franka_msgs::SetFullCollisionBehavior::Response &res) |
| Callback for the service interface to franka::robot::setFullCollisionBehavior. More... | |
| void | franka_hw::setJointImpedance (franka::Robot &robot, const franka_msgs::SetJointImpedance::Request &req, franka_msgs::SetJointImpedance::Response &res) |
| Callback for the service interface to franka::robot::setJointImpedance. More... | |
| void | franka_hw::setKFrame (franka::Robot &robot, const franka_msgs::SetKFrame::Request &req, franka_msgs::SetKFrame::Response &res) |
| Callback for the service interface to franka::robot::setKFrame. More... | |
| void | franka_hw::setLoad (franka::Robot &robot, const franka_msgs::SetLoad::Request &req, franka_msgs::SetLoad::Response &res) |
| Callback for the service interface to franka::robot::setLoad. More... | |
| void | franka_hw::setupServices (franka::Robot &robot, ros::NodeHandle &node_handle, ServiceContainer &services) |
| Sets up all services relevant for a libfranka robot inside a service container. More... | |