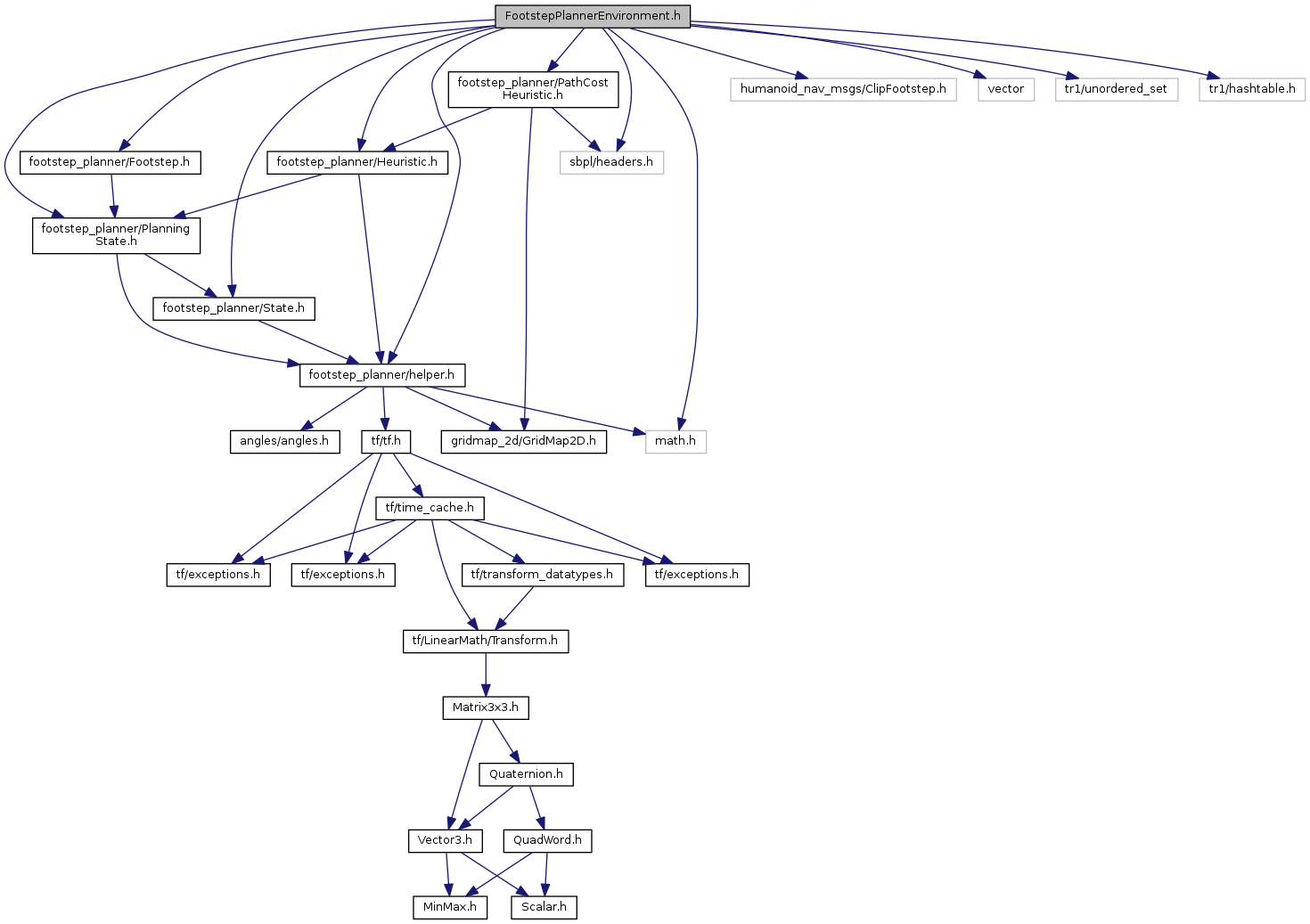
#include <footstep_planner/helper.h>#include <footstep_planner/PathCostHeuristic.h>#include <footstep_planner/Heuristic.h>#include <footstep_planner/Footstep.h>#include <footstep_planner/PlanningState.h>#include <footstep_planner/State.h>#include <humanoid_nav_msgs/ClipFootstep.h>#include <sbpl/headers.h>#include <math.h>#include <vector>#include <tr1/unordered_set>#include <tr1/hashtable.h>
Include dependency graph for FootstepPlannerEnvironment.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | footstep_planner::environment_params |
| class | footstep_planner::FootstepPlannerEnvironment |
| A class defining a footstep planner environment for humanoid robots used by the SBPL to perform planning tasks. More... | |
| struct | footstep_planner::FootstepPlannerEnvironment::IntPairHash |
| struct | footstep_planner::FootstepPlannerEnvironment::less |
| < operator for planning states. More... | |
Namespaces | |
| footstep_planner | |