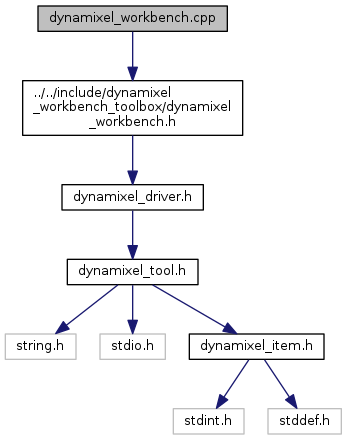
Include dependency graph for dynamixel_workbench.cpp:
Go to the source code of this file.
Variables | |
| static const uint8_t | CURRENT_BASED_POSITION_CONTROL_MODE = 5 |
| static const uint8_t | CURRENT_CONTROL_MODE = 0 |
| static const uint8_t | EXTENDED_POSITION_CONTROL_MODE = 4 |
| static const uint8_t | JOINT_MODE = 2 |
| static const ModelInfo * | model_info = NULL |
| static const char * | model_name = NULL |
| static const uint8_t | MULTI_TURN_MODE = 101 |
| static const uint8_t | POSITION_CONTROL_MODE = 3 |
| static const uint8_t | PWM_CONTROL_MODE = 16 |
| static const uint8_t | TORQUE_CONTROL_MODE = 100 |
| static const uint8_t | VELOCITY_CONTROL_MODE = 1 |
| static const uint8_t | WHEEL_MODE = 1 |
Variable Documentation
|
static |
Definition at line 28 of file dynamixel_workbench.cpp.
|
static |
Definition at line 24 of file dynamixel_workbench.cpp.
|
static |
Definition at line 27 of file dynamixel_workbench.cpp.
|
static |
Definition at line 22 of file dynamixel_workbench.cpp.
|
static |
Definition at line 34 of file dynamixel_workbench.cpp.
|
static |
Definition at line 33 of file dynamixel_workbench.cpp.
|
static |
Definition at line 31 of file dynamixel_workbench.cpp.
|
static |
Definition at line 26 of file dynamixel_workbench.cpp.
|
static |
Definition at line 29 of file dynamixel_workbench.cpp.
|
static |
Definition at line 30 of file dynamixel_workbench.cpp.
|
static |
Definition at line 25 of file dynamixel_workbench.cpp.
|
static |
Definition at line 21 of file dynamixel_workbench.cpp.