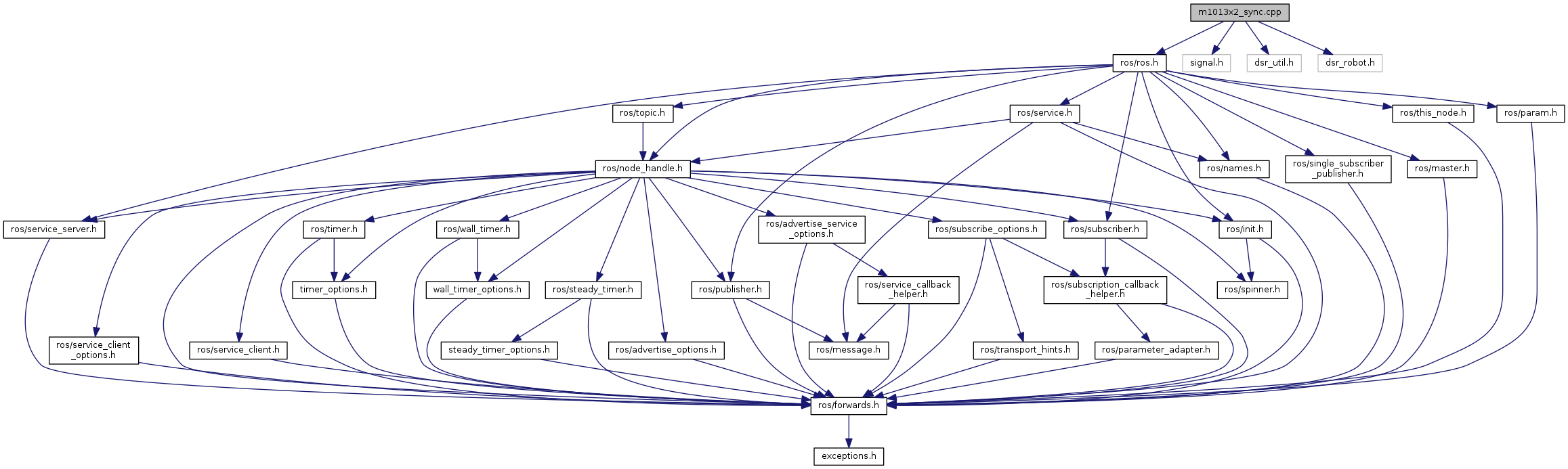
Go to the source code of this file.
Macros | |
| #define | NUM_ROBOT 6 |
Functions | |
| int | main (int argc, char **argv) |
| CRobotSync | RobotSync (NUM_ROBOT) |
| void | SigHandler (int sig) |
| void | thread_robot1 (ros::NodeHandle nh) |
| void | thread_robot2 (ros::NodeHandle nh) |
| void | thread_robot3 (ros::NodeHandle nh) |
| void | thread_robot4 (ros::NodeHandle nh) |
| void | thread_robot5 (ros::NodeHandle nh) |
| void | thread_robot6 (ros::NodeHandle nh) |
Variables | |
| float | J00 [6] = {-180, 0, -145, 0, -35, 0} |
| float | J01r [6] = {-180.0, 71.4, -145.0, 0.0, -9.7, 0.0} |
| float | JReady [6] = {0, -20, 110, 0, 60, 0} |
| string | ROBOT_ID = "dsr01" |
| string | ROBOT_ID2 = "dsr02" |
| string | ROBOT_MODEL = "m1013" |
| string | ROBOT_MODEL2 = "m1013" |
| float | TCP_POS [6] = {0, 0, 0,0 ,0, 0} |
Macro Definition Documentation
| #define NUM_ROBOT 6 |
Definition at line 20 of file m1013x2_sync.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 150 of file m1013x2_sync.cpp.
| CRobotSync RobotSync | ( | NUM_ROBOT | ) |
| void SigHandler | ( | int | sig | ) |
Definition at line 124 of file m1013x2_sync.cpp.
| void thread_robot1 | ( | ros::NodeHandle | nh | ) |
Definition at line 36 of file m1013x2_sync.cpp.
| void thread_robot2 | ( | ros::NodeHandle | nh | ) |
Definition at line 54 of file m1013x2_sync.cpp.
| void thread_robot3 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 73 of file m1013x2_sync.cpp.
| void thread_robot4 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 86 of file m1013x2_sync.cpp.
| void thread_robot5 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 99 of file m1013x2_sync.cpp.
| void thread_robot6 | ( | ros::NodeHandle | nh | ) |
Definition at line 112 of file m1013x2_sync.cpp.
Variable Documentation
| float J00[6] = {-180, 0, -145, 0, -35, 0} |
Definition at line 33 of file m1013x2_sync.cpp.
| float J01r[6] = {-180.0, 71.4, -145.0, 0.0, -9.7, 0.0} |
Definition at line 34 of file m1013x2_sync.cpp.
| float JReady[6] = {0, -20, 110, 0, 60, 0} |
Definition at line 31 of file m1013x2_sync.cpp.
| string ROBOT_ID = "dsr01" |
Definition at line 21 of file m1013x2_sync.cpp.
| string ROBOT_ID2 = "dsr02" |
Definition at line 23 of file m1013x2_sync.cpp.
| string ROBOT_MODEL = "m1013" |
Definition at line 22 of file m1013x2_sync.cpp.
| string ROBOT_MODEL2 = "m1013" |
Definition at line 24 of file m1013x2_sync.cpp.
| float TCP_POS[6] = {0, 0, 0,0 ,0, 0} |
Definition at line 32 of file m1013x2_sync.cpp.