#include <ros/ros.h>#include <signal.h>#include <time.h>#include <chrono>#include "dsr_util.h"#include "dsr_robot.h"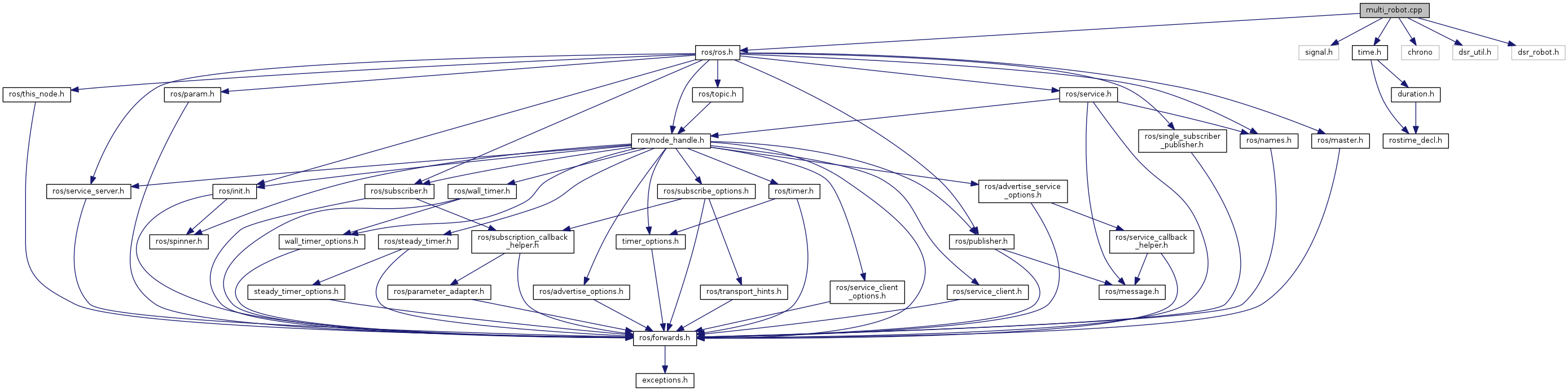
Go to the source code of this file.
Macros | |
| #define | NUM_ROBOT 2 |
Functions | |
| int | main (int argc, char **argv) |
| CRobotSync | RobotSync (NUM_ROBOT) |
| void | SigHandler (int sig) |
| void | thread_robot1 (ros::NodeHandle nh) |
| void | thread_robot2 (ros::NodeHandle nh) |
| void | thread_robot3 (ros::NodeHandle nh) |
| void | thread_robot4 (ros::NodeHandle nh) |
| void | thread_robot5 (ros::NodeHandle nh) |
| void | thread_robot6 (ros::NodeHandle nh) |
Variables | |
| float | acc_spi [2] = {150, 150} |
| float | accx [2] = {0, 0} |
| float | amp [6] = {0, 0, 0, 30, 30, 0} |
| float | dREL1 [6] = {0, 0, 350, 0, 0, 0} |
| float | dREL2 [6] = {0, 0, -350, 0, 0, 0} |
| float | J00 [6] = {-180, 0, -145, 0, -35, 0} |
| float | J01r [6] = {-180.0, 71.4, -145.0, 0.0, -9.7, 0.0} |
| float | J02r [6] = {-180.0, 67.7, -144.0, 0.0, 76.3, 0.0} |
| float | J03r [6] = {-180.0, 0.0, 0.0, 0.0, 0.0, 0.0} |
| float | J04r [6] = {-90.0, 0.0, 0.0, 0.0, 0.0, 0.0} |
| float | J04r1 [6] = {-90.0, 30.0, -60.0, 0.0, 30.0, -0.0} |
| float | J04r2 [6] = {-90.0, -45.0, 90.0, 0.0, -45.0, -0.0} |
| float | J04r3 [6] = {-90.0, 60.0, -120.0, 0.0, 60.0, -0.0} |
| float | J04r4 [6] = {-90.0, 0.0, -0.0, 0.0, 0.0, -0.0} |
| float | J05r [6] = {-144.0, -4.0, -84.8, -90.9, 54.0, -1.1} |
| float | J06r [6] |
| float | J07r [6] = {-152.4, 12.4, -78.6, 18.7, -68.3, -37.7} |
| float | J08r [6] = {-90.0, 30.0, -120.0, -90.0, -90.0, 0.0} |
| float | J1 [6] = {81.2, 20.8, 127.8, 162.5, 56.1, -37.1} |
| float | JEnd [6] = {0.0, -12.6, 101.1, 0.0, 91.5, -0.0} |
| float | JReady [6] = {0, -20, 110, 0, 60, 0} |
| float | period [6] = {0, 0, 0, 3, 6, 0} |
| string | ROBOT_ID = "dsr01" |
| string | ROBOT_ID2 = "dsr02" |
| string | ROBOT_MODEL = "m1013" |
| string | ROBOT_MODEL2 = "m1013" |
| float | TCP_POS [6] = {0, 0, 0,0 ,0, 0} |
| float | vel_spi [2] = {400, 400} |
| float | velx [2] = {0,0} |
| float | X0 [6] = {-88.7, 799.0, 182.3, 95.7, 93.7, 133.9} |
| float | x01 [6] = {423.6, 334.5, 651.2, 84.7, -180.0, 84.7} |
| float | x02 [6] = {423.6, 34.5, 951.2, 68.2, -180.0, 68.2} |
| float | x0204c [2][6] |
| float | x03 [6] = {423.6, -265.5, 651.2, 76.1, -180.0, 76.1} |
| float | x04 [6] = {423.6, 34.5, 351.2, 81.3, -180.0, 81.3} |
| float | X1 [6] = {304.2, 871.8, 141.5, 99.5, 84.9, 133.4} |
| float | X2 [6] = {437.1, 876.9, 362.1, 99.6, 84.0, 132.1} |
| float | X3 [6] = {-57.9, 782.4, 478.4, 99.6, 84.0, 132.1} |
Macro Definition Documentation
| #define NUM_ROBOT 2 |
Definition at line 22 of file multi_robot.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 382 of file multi_robot.cpp.
| CRobotSync RobotSync | ( | NUM_ROBOT | ) |
| void SigHandler | ( | int | sig | ) |
delete(&RobotSync);
Definition at line 355 of file multi_robot.cpp.
| void thread_robot1 | ( | ros::NodeHandle | nh | ) |
Definition at line 68 of file multi_robot.cpp.
| void thread_robot2 | ( | ros::NodeHandle | nh | ) |
Definition at line 186 of file multi_robot.cpp.
| void thread_robot3 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 304 of file multi_robot.cpp.
| void thread_robot4 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 317 of file multi_robot.cpp.
| void thread_robot5 | ( | ros::NodeHandle | nh | ) |
r.sleep();
Definition at line 330 of file multi_robot.cpp.
| void thread_robot6 | ( | ros::NodeHandle | nh | ) |
Definition at line 343 of file multi_robot.cpp.
Variable Documentation
| float acc_spi[2] = {150, 150} |
Definition at line 53 of file multi_robot.cpp.
| float accx[2] = {0, 0} |
Definition at line 51 of file multi_robot.cpp.
| float amp[6] = {0, 0, 0, 30, 30, 0} |
Definition at line 59 of file multi_robot.cpp.
| float dREL1[6] = {0, 0, 350, 0, 0, 0} |
Definition at line 48 of file multi_robot.cpp.
| float dREL2[6] = {0, 0, -350, 0, 0, 0} |
Definition at line 49 of file multi_robot.cpp.
| float J00[6] = {-180, 0, -145, 0, -35, 0} |
Definition at line 34 of file multi_robot.cpp.
| float J01r[6] = {-180.0, 71.4, -145.0, 0.0, -9.7, 0.0} |
Definition at line 35 of file multi_robot.cpp.
| float J02r[6] = {-180.0, 67.7, -144.0, 0.0, 76.3, 0.0} |
Definition at line 36 of file multi_robot.cpp.
| float J03r[6] = {-180.0, 0.0, 0.0, 0.0, 0.0, 0.0} |
Definition at line 37 of file multi_robot.cpp.
| float J04r[6] = {-90.0, 0.0, 0.0, 0.0, 0.0, 0.0} |
Definition at line 38 of file multi_robot.cpp.
| float J04r1[6] = {-90.0, 30.0, -60.0, 0.0, 30.0, -0.0} |
Definition at line 39 of file multi_robot.cpp.
| float J04r2[6] = {-90.0, -45.0, 90.0, 0.0, -45.0, -0.0} |
Definition at line 40 of file multi_robot.cpp.
| float J04r3[6] = {-90.0, 60.0, -120.0, 0.0, 60.0, -0.0} |
Definition at line 41 of file multi_robot.cpp.
| float J04r4[6] = {-90.0, 0.0, -0.0, 0.0, 0.0, -0.0} |
Definition at line 42 of file multi_robot.cpp.
| float J05r[6] = {-144.0, -4.0, -84.8, -90.9, 54.0, -1.1} |
Definition at line 43 of file multi_robot.cpp.
| float J06r[6] |
Definition at line 44 of file multi_robot.cpp.
| float J07r[6] = {-152.4, 12.4, -78.6, 18.7, -68.3, -37.7} |
Definition at line 45 of file multi_robot.cpp.
| float J08r[6] = {-90.0, 30.0, -120.0, -90.0, -90.0, 0.0} |
Definition at line 46 of file multi_robot.cpp.
| float J1[6] = {81.2, 20.8, 127.8, 162.5, 56.1, -37.1} |
Definition at line 54 of file multi_robot.cpp.
| float JEnd[6] = {0.0, -12.6, 101.1, 0.0, 91.5, -0.0} |
Definition at line 47 of file multi_robot.cpp.
| float JReady[6] = {0, -20, 110, 0, 60, 0} |
Definition at line 31 of file multi_robot.cpp.
| float period[6] = {0, 0, 0, 3, 6, 0} |
Definition at line 60 of file multi_robot.cpp.
| string ROBOT_ID = "dsr01" |
Definition at line 23 of file multi_robot.cpp.
| string ROBOT_ID2 = "dsr02" |
Definition at line 25 of file multi_robot.cpp.
| string ROBOT_MODEL = "m1013" |
Definition at line 24 of file multi_robot.cpp.
| string ROBOT_MODEL2 = "m1013" |
Definition at line 26 of file multi_robot.cpp.
| float TCP_POS[6] = {0, 0, 0,0 ,0, 0} |
Definition at line 33 of file multi_robot.cpp.
| float vel_spi[2] = {400, 400} |
Definition at line 52 of file multi_robot.cpp.
| float velx[2] = {0,0} |
Definition at line 50 of file multi_robot.cpp.
| float X0[6] = {-88.7, 799.0, 182.3, 95.7, 93.7, 133.9} |
Definition at line 55 of file multi_robot.cpp.
| float x01[6] = {423.6, 334.5, 651.2, 84.7, -180.0, 84.7} |
Definition at line 61 of file multi_robot.cpp.
| float x02[6] = {423.6, 34.5, 951.2, 68.2, -180.0, 68.2} |
Definition at line 62 of file multi_robot.cpp.
| float x0204c[2][6] |
Definition at line 65 of file multi_robot.cpp.
| float x03[6] = {423.6, -265.5, 651.2, 76.1, -180.0, 76.1} |
Definition at line 63 of file multi_robot.cpp.
| float x04[6] = {423.6, 34.5, 351.2, 81.3, -180.0, 81.3} |
Definition at line 64 of file multi_robot.cpp.
| float X1[6] = {304.2, 871.8, 141.5, 99.5, 84.9, 133.4} |
Definition at line 56 of file multi_robot.cpp.
| float X2[6] = {437.1, 876.9, 362.1, 99.6, 84.0, 132.1} |
Definition at line 57 of file multi_robot.cpp.
| float X3[6] = {-57.9, 782.4, 478.4, 99.6, 84.0, 132.1} |
Definition at line 58 of file multi_robot.cpp.