#include "denso_ros_control/denso_hardware_interface.h"#include "controller_manager/controller_manager.h"
Include dependency graph for main.cpp:
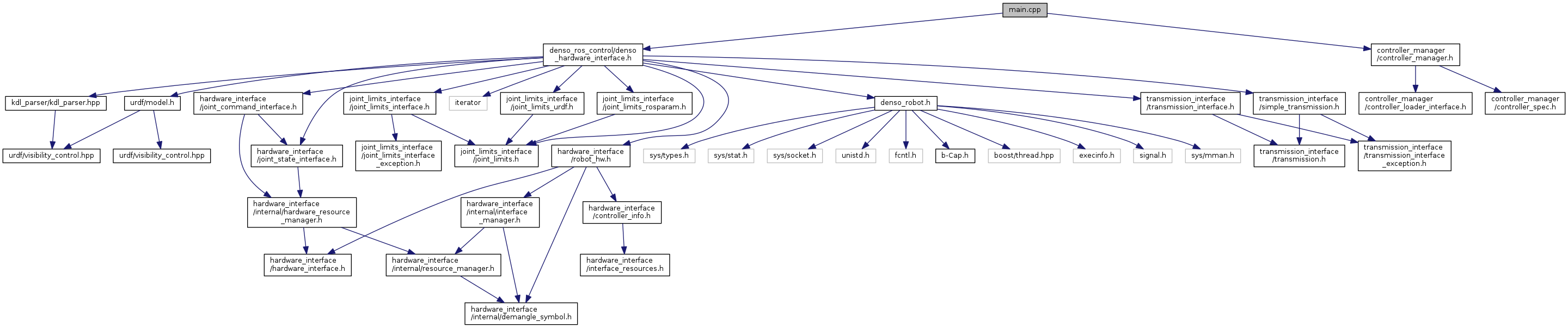
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
| void | mySigintHandler (int sig) |
| void | shutdown (boost::shared_ptr< DensoRobotHW > robot, boost::shared_ptr< ros::AsyncSpinner > spinner) |
Variables | |
| bool | g_shutdown = false |
Function Documentation
| void shutdown | ( | boost::shared_ptr< DensoRobotHW > | robot, |
| boost::shared_ptr< ros::AsyncSpinner > | spinner | ||
| ) |