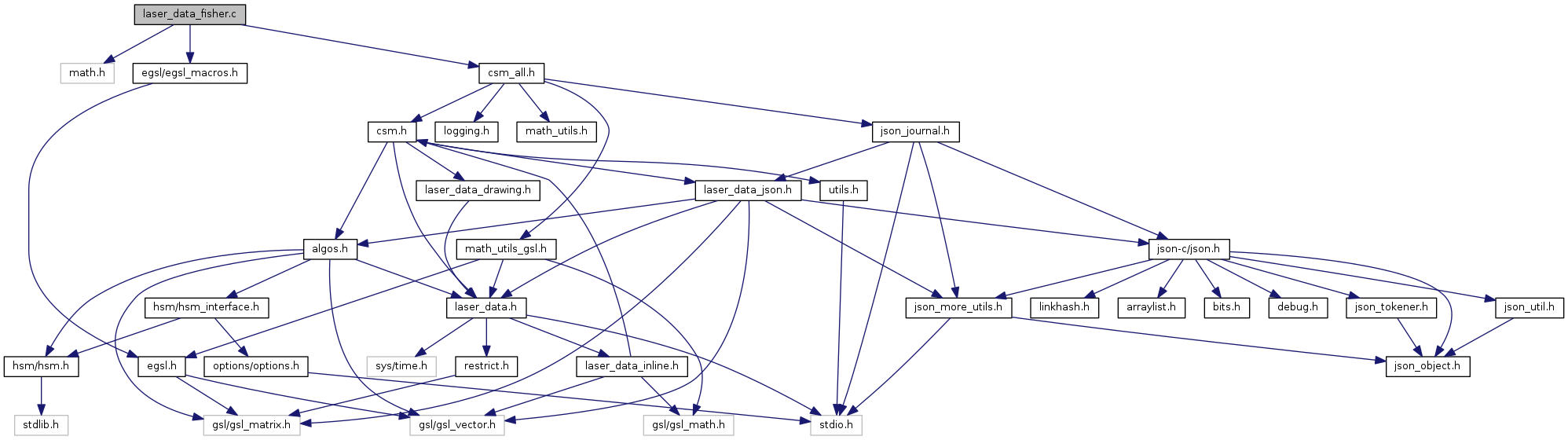
Include dependency graph for laser_data_fisher.c:
Go to the source code of this file.
Functions | |
| val | ld_fisher0 (LDP ld) |
Function Documentation
This computes the Fisher Information Matrix, in robot coordinates. Uses field 'true_alpha' (and 'theta', 'readings').
For details about the the Fisher Information Matrix, please see this paper: http://purl.org/censi/2006/accuracy
Definition at line 14 of file laser_data_fisher.c.