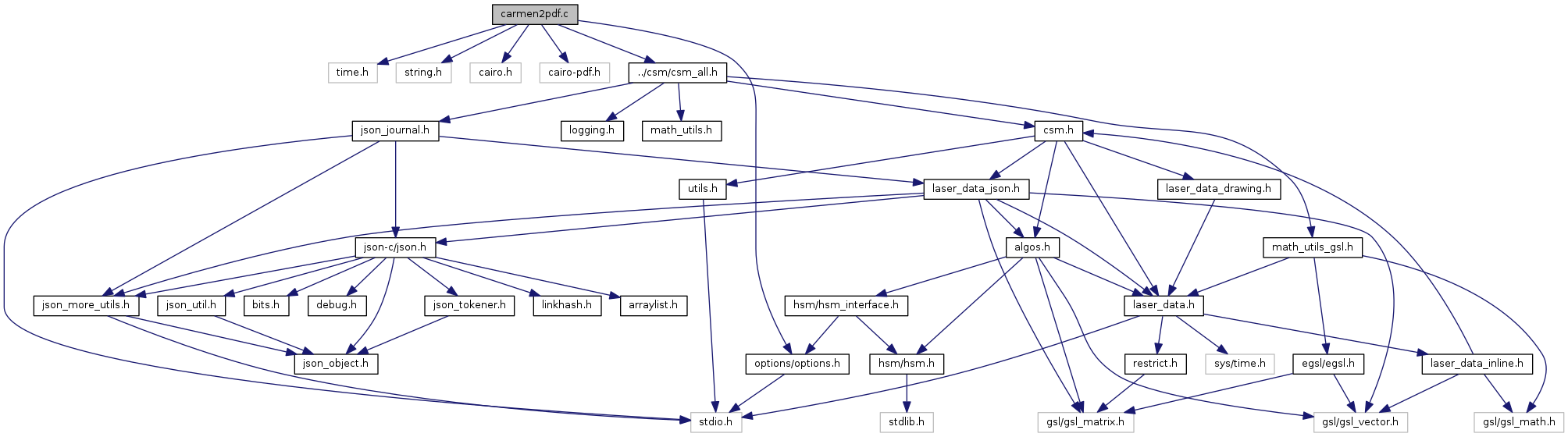
#include <time.h>
#include <string.h>
#include <cairo.h>
#include <cairo-pdf.h>
#include <options/options.h>
#include "../csm/csm_all.h"
Go to the source code of this file.
|
| void | bb_w2b (struct bounding_box *bb, double wx, double wy, double *bx, double *by) |
| |
| void | carmen2pdf (struct params p) |
| |
| void | get_bb (struct params *p, struct bounding_box *bb) |
| |
| void | ld_get_buffer_polar (double phi, double rho, const double *pose, double *x, double *y, struct bounding_box *bb, double *bx, double *by) |
| |
| double * | ld_get_reference (LDP ld, reference use_reference) |
| |
| void | ld_get_world (LDP ld, int i, double *x, double *y, reference use_reference) |
| |
| void | ld_getbb (LDP ld, double *x0, double *y0, double *x1, double *y1, reference use_reference, double horizon) |
| |
| int | main (int argc, const char *argv[]) |
| |
| int | should_consider (struct params *p, int counter) |
| |
| Enumerator |
|---|
| Invalid |
|
| Odometry |
|
| Estimate |
|
| True_pose |
|
Definition at line 17 of file carmen2pdf.c.
| void bb_w2b |
( |
struct bounding_box * |
bb, |
|
|
double |
wx, |
|
|
double |
wy, |
|
|
double * |
bx, |
|
|
double * |
by |
|
) |
| |
| void carmen2pdf |
( |
struct params |
p | ) |
|
Reads all file to find bounding box
Definition at line 126 of file carmen2pdf.c.
| void ld_get_buffer_polar |
( |
double |
phi, |
|
|
double |
rho, |
|
|
const double * |
pose, |
|
|
double * |
x, |
|
|
double * |
y, |
|
|
struct bounding_box * |
bb, |
|
|
double * |
bx, |
|
|
double * |
by |
|
) |
| |
| double* ld_get_reference |
( |
LDP |
ld, |
|
|
reference |
use_reference |
|
) |
| |
| void ld_get_world |
( |
LDP |
ld, |
|
|
int |
i, |
|
|
double * |
x, |
|
|
double * |
y, |
|
|
reference |
use_reference |
|
) |
| |
| void ld_getbb |
( |
LDP |
ld, |
|
|
double * |
x0, |
|
|
double * |
y0, |
|
|
double * |
x1, |
|
|
double * |
y1, |
|
|
reference |
use_reference, |
|
|
double |
horizon |
|
) |
| |
| int main |
( |
int |
argc, |
|
|
const char * |
argv[] |
|
) |
| |
| int should_consider |
( |
struct params * |
p, |
|
|
int |
counter |
|
) |
| |
| const char* reference_name[4] = { "invalid","odometry","estimate","true_pose"} |