#include <cm_740_module.h>
Public Member Functions | |
| CM740Module () | |
| void | initialize (const int control_cycle_msec, robotis_framework::Robot *robot) |
| void | process (std::map< std::string, robotis_framework::Dynamixel * > dxls, std::map< std::string, robotis_framework::Sensor * > sensors) |
| virtual | ~CM740Module () |
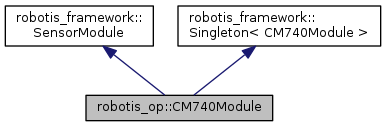
 Public Member Functions inherited from robotis_framework::SensorModule Public Member Functions inherited from robotis_framework::SensorModule | |
| std::string | getModuleName () |
| virtual | ~SensorModule () |
Private Member Functions | |
| void | fusionIMU () |
| double | getAccValue (int raw_value) |
| double | getGyroValue (int raw_value) |
| void | handleButton (const std::string &button_name) |
| void | handleVoltage (double present_volt) |
| double | lowPassFilter (double alpha, double x_new, double x_old) |
| void | publishButtonMsg (const std::string &button_name) |
| void | publishStatusMsg (unsigned int type, std::string msg) |
| void | queueThread () |
Private Attributes | |
| ros::Time | button_press_time_ |
| ros::Publisher | button_pub_ |
| std::map< std::string, bool > | buttons_ |
| std::map< std::string, ros::Time > | buttons_press_time_ |
| int | control_cycle_msec_ |
| const bool | DEBUG_PRINT |
| const double | G_ACC = 9.80665 |
| sensor_msgs::Imu | imu_msg_ |
| ros::Publisher | imu_pub_ |
| ros::Time | last_msg_time_ |
| double | present_volt_ |
| double | previous_volt_ |
| boost::thread | queue_thread_ |
| ros::Publisher | status_msg_pub_ |
Additional Inherited Members | |
| Static Public Member Functions inherited from robotis_framework::Singleton< CM740Module > | |
| static void | destroyInstance () |
| static T * | getInstance () |
| Public Attributes inherited from robotis_framework::SensorModule | |
| std::map< std::string, double > | result_ |
| Protected Member Functions inherited from robotis_framework::Singleton< CM740Module > | |
| Singleton & | operator= (Singleton const &) |
| Singleton (Singleton const &) | |
| Singleton () | |
| Protected Attributes inherited from robotis_framework::SensorModule | |
| std::string | module_name_ |
Detailed Description
Definition at line 37 of file cm_740_module.h.
Constructor & Destructor Documentation
| robotis_op::CM740Module::CM740Module | ( | ) |
Definition at line 25 of file cm_740_module.cpp.
|
virtual |
Definition at line 52 of file cm_740_module.cpp.
Member Function Documentation
|
private |
Definition at line 134 of file cm_740_module.cpp.
|
private |
Definition at line 129 of file cm_740_module.cpp.
|
private |
Definition at line 123 of file cm_740_module.cpp.
|
private |
Definition at line 176 of file cm_740_module.cpp.
|
private |
Definition at line 228 of file cm_740_module.cpp.
|
virtual |
Implements robotis_framework::SensorModule.
Definition at line 57 of file cm_740_module.cpp.
|
private |
Definition at line 266 of file cm_740_module.cpp.
|
virtual |
Implements robotis_framework::SensorModule.
Definition at line 80 of file cm_740_module.cpp.
|
private |
Definition at line 219 of file cm_740_module.cpp.
|
private |
Definition at line 255 of file cm_740_module.cpp.
|
private |
Definition at line 63 of file cm_740_module.cpp.
Member Data Documentation
|
private |
Definition at line 68 of file cm_740_module.h.
|
private |
Definition at line 77 of file cm_740_module.h.
|
private |
Definition at line 66 of file cm_740_module.h.
|
private |
Definition at line 67 of file cm_740_module.h.
|
private |
Definition at line 64 of file cm_740_module.h.
|
private |
Definition at line 49 of file cm_740_module.h.
|
private |
Definition at line 50 of file cm_740_module.h.
|
private |
Definition at line 73 of file cm_740_module.h.
|
private |
Definition at line 76 of file cm_740_module.h.
|
private |
Definition at line 69 of file cm_740_module.h.
|
private |
Definition at line 71 of file cm_740_module.h.
|
private |
Definition at line 70 of file cm_740_module.h.
|
private |
Definition at line 65 of file cm_740_module.h.
|
private |
Definition at line 78 of file cm_740_module.h.
The documentation for this class was generated from the following files: