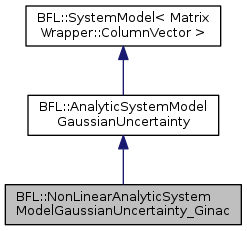
Class for nonlinear analytic systemmodels with additive gaussian noise. More...
#include <nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.h>
Public Member Functions | |
| GiNaC::matrix | FunctionGet () |
| output stream for system model More... | |
| vector< GiNaC::symbol > | InputGet () |
| Get input symbols. More... | |
| NonLinearAnalyticSystemModelGaussianUncertainty_Ginac (NonLinearAnalyticConditionalGaussian_Ginac *const pdf) | |
| Constructor. More... | |
| vector< GiNaC::symbol > | StateGet () |
| Get State symbols. More... | |
| virtual | ~NonLinearAnalyticSystemModelGaussianUncertainty_Ginac () |
| Destructor. More... | |
 Public Member Functions inherited from BFL::AnalyticSystemModelGaussianUncertainty Public Member Functions inherited from BFL::AnalyticSystemModelGaussianUncertainty | |
| AnalyticSystemModelGaussianUncertainty (AnalyticConditionalGaussian *Systempdf) | |
| Constructor. More... | |
| MatrixWrapper::SymmetricMatrix | CovarianceGet (const MatrixWrapper::ColumnVector &u, const MatrixWrapper::ColumnVector &x) |
| Covariance of system noise. More... | |
| MatrixWrapper::Matrix | df_dxGet (const MatrixWrapper::ColumnVector &u, const MatrixWrapper::ColumnVector &x) |
| Returns F-matrix. More... | |
| MatrixWrapper::ColumnVector | PredictionGet (const MatrixWrapper::ColumnVector &u, const MatrixWrapper::ColumnVector &x) |
| Returns prediction of state. More... | |
| virtual | ~AnalyticSystemModelGaussianUncertainty () |
| Default copy Constructor, interface class. More... | |
| Public Member Functions inherited from BFL::SystemModel< MatrixWrapper::ColumnVector > | |
| Probability | ProbabilityGet (const MatrixWrapper::ColumnVector &x_k, const MatrixWrapper::ColumnVector &x_kminusone, const MatrixWrapper::ColumnVector &u) |
| Get the probability of arriving in a next state. More... | |
| Probability | ProbabilityGet (const MatrixWrapper::ColumnVector &x_k, const MatrixWrapper::ColumnVector &x_kminusone) |
| Get the probability of arriving in a next state. More... | |
| MatrixWrapper::ColumnVector | Simulate (const MatrixWrapper::ColumnVector &x, const MatrixWrapper::ColumnVector &u, int sampling_method=DEFAULT, void *sampling_args=NULL) |
| Simulate the system. More... | |
| MatrixWrapper::ColumnVector | Simulate (const MatrixWrapper::ColumnVector &x, int sampling_method=DEFAULT, void *sampling_args=NULL) |
| Simulate the system (no input system) More... | |
| int | StateSizeGet () const |
| Get State Size. More... | |
| SystemModel (ConditionalPdf< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *systempdf=NULL) | |
| Constructor. More... | |
| ConditionalPdf< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > * | SystemPdfGet () |
| Get the SystemPDF. More... | |
| void | SystemPdfSet (ConditionalPdf< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *pdf) |
| Set the SystemPDF. More... | |
| bool | SystemWithoutInputs () const |
| Has the system inputs or not. More... | |
| virtual | ~SystemModel () |
| Destructor. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from BFL::SystemModel< MatrixWrapper::ColumnVector > | |
| ConditionalPdf< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > * | _SystemPdf |
ConditionalPdf representing  . More... . More... | |
| bool | _systemWithoutInputs |
| System with no inputs? More... | |
Detailed Description
Class for nonlinear analytic systemmodels with additive gaussian noise.
This class represents all measurementmodels of the form
![\[ x_k = f(x_{k-}) + N(\mu, \Sigma) \]](form_42.png)
Definition at line 40 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.h.
Constructor & Destructor Documentation
| BFL::NonLinearAnalyticSystemModelGaussianUncertainty_Ginac::NonLinearAnalyticSystemModelGaussianUncertainty_Ginac | ( | NonLinearAnalyticConditionalGaussian_Ginac *const | ) |
Constructor.
- Parameters
-
pdf conditional pdf, gaussian uncertainty
Definition at line 30 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.cpp.
|
virtual |
Destructor.
Definition at line 35 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.cpp.
Member Function Documentation
| GiNaC::matrix BFL::NonLinearAnalyticSystemModelGaussianUncertainty_Ginac::FunctionGet | ( | ) |
output stream for system model
Get function
Definition at line 48 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.cpp.
| vector< GiNaC::symbol > BFL::NonLinearAnalyticSystemModelGaussianUncertainty_Ginac::InputGet | ( | ) |
Get input symbols.
Definition at line 60 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.cpp.
| vector< GiNaC::symbol > BFL::NonLinearAnalyticSystemModelGaussianUncertainty_Ginac::StateGet | ( | ) |
Get State symbols.
Definition at line 54 of file nonlinearanalyticsystemmodel_gaussianuncertainty_ginac.cpp.
The documentation for this class was generated from the following files: