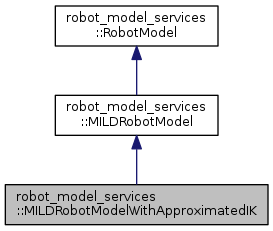
MILDRobotModelWithApproximatedIK implements a model of pan tilt unit robot where the inverse kinematic is defined by an approximation function. More...
#include <MILDRobotModelWithApproximatedIK.hpp>
Public Member Functions | |
| RobotStatePtr | calculateRobotState (const RobotStatePtr &sourceRobotState, const SimpleVector3 &position, const SimpleQuaternion &orientation) |
| calculates the target robot state More... | |
| MILDRobotModelWithApproximatedIK () | |
| constructor of the MILDRobotModelWithApproximatedIK More... | |
| virtual | ~MILDRobotModelWithApproximatedIK () |
| destructor of the MILDRobotModelWithApproximatedIK More... | |
 Public Member Functions inherited from robot_model_services::MILDRobotModel Public Member Functions inherited from robot_model_services::MILDRobotModel | |
| geometry_msgs::Pose | calculateCameraPose (const RobotStatePtr &sourceRobotState) |
| Uses a given RobotState to calculate the camera frame. More... | |
| float | getBase_RotationalMovementCosts (const RobotStatePtr &sourceRobotState, const RobotStatePtr &targetRobotState) |
| float | getBase_TranslationalMovementCosts (const RobotStatePtr &sourceRobotState, const RobotStatePtr &targetRobotState) |
| Calculates the movement costs from sourceRobotState to targetRobotState. Returns -1 if pose is not reachable. More... | |
| geometry_msgs::Pose | getCameraPose () |
| float | getDistance (const geometry_msgs::Point &sourcePosition, const geometry_msgs::Point &targetPosition) |
| nav_msgs::Path | getNavigationPath (const geometry_msgs::Point &sourcePosition, const geometry_msgs::Point &targetPosition, double sourceRotationBase, double targetRotationBase) |
| nav_msgs::Path | getNavigationPath (const geometry_msgs::Point &sourcePosition, const geometry_msgs::Point &targetPosition) |
| float | getPTU_PanMovementCosts (const RobotStatePtr &sourceRobotState, const RobotStatePtr &targetRobotState) |
| float | getPTU_TiltMovementCosts (const RobotStatePtr &sourceRobotState, const RobotStatePtr &targetRobotState) |
| geometry_msgs::Pose | getRobotPose () |
| bool | isPoseReachable (const SimpleVector3 &position, const SimpleQuaternion &orientation) |
| bool | isPositionAllowed (const geometry_msgs::Point &position) |
| bool | isPositionReachable (const geometry_msgs::Point &sourcePosition, const geometry_msgs::Point &targetPosition) |
| MILDRobotModel () | |
| constructor of the MILDRobotModel More... | |
| void | setPanAngleLimits (float minAngleDegrees, float maxAngleDegrees) |
| sets the angle limits of the pan angle. More... | |
| void | setRotationAngleLimits (float minAngleDegrees, float maxAngleDegrees) |
| sets the angle limits of the rotation angle. More... | |
| void | setTiltAngleLimits (float minAngleDegrees, float maxAngleDegrees) |
| sets the angle limits of the tilt angle. More... | |
| virtual | ~MILDRobotModel () |
| destructor of the MILDRobotModel More... | |
| Public Member Functions inherited from robot_model_services::RobotModel | |
| RobotStatePtr | calculateRobotState (const robot_model_services::SimpleVector3 &position, const robot_model_services::SimpleQuaternion &orientation) |
| calculates the target robot state by assuming the saved current state of the roboter as source state More... | |
| float | getBase_RotationalMovementCosts (const RobotStatePtr &targetRobotState) |
| float | getBase_TranslationalMovementCosts (const RobotStatePtr &targetRobotState) |
| RobotStatePtr | getCurrentRobotState () |
| float | getPTU_PanMovementCosts (const RobotStatePtr &targetRobotState) |
| float | getPTU_TiltMovementCosts (const RobotStatePtr &targetRobotState) |
| RobotModel () | |
| the constructor of the RobotModel object More... | |
| void | setCurrentRobotState (const RobotStatePtr ¤tRobotState) |
| virtual | ~RobotModel () |
| the destructor of the RobotModel object More... | |
Additional Inherited Members | |
| Protected Attributes inherited from robot_model_services::MILDRobotModel | |
| tf::TransformListener | listener |
| DebugHelperPtr | mDebugHelperPtr |
| std::string | mFrameName_map |
| std::string | mFrameName_mild_base |
| std::string | mFrameName_mild_camera_left |
| std::string | mFrameName_mild_camera_mount_link |
| std::string | mFrameName_mild_camera_right |
| std::string | mFrameName_mild_ptu_base_link |
| std::string | mFrameName_mild_ptu_pan_link |
| std::string | mFrameName_mild_ptu_pan_link_rotated |
| std::string | mFrameName_mild_ptu_tilt_link |
| std::string | mFrameName_mild_ptu_tilt_link_rotated |
| MapHelperPtr | mMapHelperPtr |
| float | mOmegaPan |
| float | mOmegaRot |
| float | mOmegaTilt |
| boost::tuple< float, float > | mPanLimits |
| boost::tuple< float, float > | mRotationLimits |
| float | mSigma |
| boost::tuple< float, float > | mTiltLimits |
| ros::NodeHandle | n |
| ros::ServiceClient | navigationCostClient |
| float | speedFactorBaseMove |
| float | speedFactorBaseRot |
| float | speedFactorPTU |
| float | tolerance |
| bool | useGlobalPlanner |
Detailed Description
MILDRobotModelWithApproximatedIK implements a model of pan tilt unit robot where the inverse kinematic is defined by an approximation function.
- Date
- 2014
- Version
- 1.0
- Copyright
- GNU Public License
Definition at line 38 of file MILDRobotModelWithApproximatedIK.hpp.
Constructor & Destructor Documentation
| robot_model_services::MILDRobotModelWithApproximatedIK::MILDRobotModelWithApproximatedIK | ( | ) |
constructor of the MILDRobotModelWithApproximatedIK
Definition at line 45 of file MILDRobotModelWithApproximatedIK.cpp.
|
virtual |
destructor of the MILDRobotModelWithApproximatedIK
Definition at line 62 of file MILDRobotModelWithApproximatedIK.cpp.
Member Function Documentation
|
virtual |
calculates the target robot state
- Parameters
-
currentRobotState the current robot state position the position orientation the orientation
- Returns
- the new robot state
Implements robot_model_services::RobotModel.
Definition at line 67 of file MILDRobotModelWithApproximatedIK.cpp.
The documentation for this class was generated from the following files: