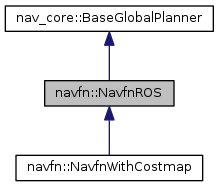
Provides a ROS wrapper for the navfn planner which runs a fast, interpolated navigation function on a costmap. More...
#include <navfn_ros.h>
Public Member Functions | |
| bool | computePotential (const geometry_msgs::Point &world_point) |
| Computes the full navigation function for the map given a point in the world to start from. More... | |
| bool | getPlanFromPotential (const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan) |
| Compute a plan to a goal after the potential for a start point has already been computed (Note: You should call computePotential first) More... | |
| double | getPointPotential (const geometry_msgs::Point &world_point) |
| Get the potential, or naviagation cost, at a given point in the world (Note: You should call computePotential first) More... | |
| void | initialize (std::string name, costmap_2d::Costmap2DROS *costmap_ros) |
| Initialization function for the NavFnROS object. More... | |
| bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan) |
| Given a goal pose in the world, compute a plan. More... | |
| bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, double tolerance, std::vector< geometry_msgs::PoseStamped > &plan) |
| Given a goal pose in the world, compute a plan. More... | |
| bool | makePlanService (nav_msgs::GetPlan::Request &req, nav_msgs::GetPlan::Response &resp) |
| NavfnROS () | |
| Default constructor for the NavFnROS object. More... | |
| NavfnROS (std::string name, costmap_2d::Costmap2DROS *costmap_ros) | |
| Constructor for the NavFnROS object. More... | |
| void | publishPlan (const std::vector< geometry_msgs::PoseStamped > &path, double r, double g, double b, double a) |
| Publish a path for visualization purposes. More... | |
| bool | validPointPotential (const geometry_msgs::Point &world_point) |
| Check for a valid potential value at a given point in the world (Note: You should call computePotential first) More... | |
| bool | validPointPotential (const geometry_msgs::Point &world_point, double tolerance) |
| Check for a valid potential value at a given point in the world (Note: You should call computePotential first) More... | |
| ~NavfnROS () | |
 Public Member Functions inherited from nav_core::BaseGlobalPlanner Public Member Functions inherited from nav_core::BaseGlobalPlanner | |
| virtual bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan, double &cost) |
| virtual | ~BaseGlobalPlanner () |
Protected Attributes | |
| bool | allow_unknown_ |
| costmap_2d::Costmap2DROS * | costmap_ros_ |
| Store a copy of the current costmap in costmap. Called by makePlan. More... | |
| bool | initialized_ |
| ros::Publisher | plan_pub_ |
| boost::shared_ptr< NavFn > | planner_ |
| pcl_ros::Publisher< PotarrPoint > | potarr_pub_ |
| bool | visualize_potential_ |
Private Member Functions | |
| void | clearRobotCell (const tf::Stamped< tf::Pose > &global_pose, unsigned int mx, unsigned int my) |
| void | mapToWorld (double mx, double my, double &wx, double &wy) |
| double | sq_distance (const geometry_msgs::PoseStamped &p1, const geometry_msgs::PoseStamped &p2) |
Private Attributes | |
| double | default_tolerance_ |
| ros::ServiceServer | make_plan_srv_ |
| boost::mutex | mutex_ |
| double | planner_window_x_ |
| double | planner_window_y_ |
| std::string | tf_prefix_ |
Additional Inherited Members | |
| Protected Member Functions inherited from nav_core::BaseGlobalPlanner | |
| BaseGlobalPlanner () | |
Detailed Description
Provides a ROS wrapper for the navfn planner which runs a fast, interpolated navigation function on a costmap.
Definition at line 58 of file navfn_ros.h.
Constructor & Destructor Documentation
| navfn::NavfnROS::NavfnROS | ( | ) |
Default constructor for the NavFnROS object.
Definition at line 51 of file navfn_ros.cpp.
| navfn::NavfnROS::NavfnROS | ( | std::string | name, |
| costmap_2d::Costmap2DROS * | costmap_ros | ||
| ) |
Constructor for the NavFnROS object.
- Parameters
-
name The name of this planner costmap A pointer to the ROS wrapper of the costmap to use
Definition at line 54 of file navfn_ros.cpp.
|
inline |
Definition at line 142 of file navfn_ros.h.
Member Function Documentation
|
private |
Definition at line 181 of file navfn_ros.cpp.
| bool navfn::NavfnROS::computePotential | ( | const geometry_msgs::Point & | world_point | ) |
Computes the full navigation function for the map given a point in the world to start from.
- Parameters
-
world_point The point to use for seeding the navigation function
- Returns
- True if the navigation function was computed successfully, false otherwise
Definition at line 149 of file navfn_ros.cpp.
| bool navfn::NavfnROS::getPlanFromPotential | ( | const geometry_msgs::PoseStamped & | goal, |
| std::vector< geometry_msgs::PoseStamped > & | plan | ||
| ) |
Compute a plan to a goal after the potential for a start point has already been computed (Note: You should call computePotential first)
- Parameters
-
goal The goal pose to create a plan to plan The plan... filled by the planner
- Returns
- True if a valid plan was found, false otherwise
Definition at line 434 of file navfn_ros.cpp.
| double navfn::NavfnROS::getPointPotential | ( | const geometry_msgs::Point & | world_point | ) |
Get the potential, or naviagation cost, at a given point in the world (Note: You should call computePotential first)
- Parameters
-
world_point The point to get the potential for
- Returns
- The navigation function's value at that point in the world
Definition at line 133 of file navfn_ros.cpp.
|
virtual |
Initialization function for the NavFnROS object.
- Parameters
-
name The name of this planner costmap A pointer to the ROS wrapper of the costmap to use for planning
Implements nav_core::BaseGlobalPlanner.
Definition at line 61 of file navfn_ros.cpp.
|
virtual |
Given a goal pose in the world, compute a plan.
- Parameters
-
start The start pose goal The goal pose plan The plan... filled by the planner
- Returns
- True if a valid plan was found, false otherwise
Implements nav_core::BaseGlobalPlanner.
Definition at line 210 of file navfn_ros.cpp.
| bool navfn::NavfnROS::makePlan | ( | const geometry_msgs::PoseStamped & | start, |
| const geometry_msgs::PoseStamped & | goal, | ||
| double | tolerance, | ||
| std::vector< geometry_msgs::PoseStamped > & | plan | ||
| ) |
Given a goal pose in the world, compute a plan.
- Parameters
-
start The start pose goal The goal pose tolerance The tolerance on the goal point for the planner plan The plan... filled by the planner
- Returns
- True if a valid plan was found, false otherwise
Definition at line 216 of file navfn_ros.cpp.
| bool navfn::NavfnROS::makePlanService | ( | nav_msgs::GetPlan::Request & | req, |
| nav_msgs::GetPlan::Response & | resp | ||
| ) |
Definition at line 193 of file navfn_ros.cpp.
|
private |
Definition at line 203 of file navfn_ros.cpp.
| void navfn::NavfnROS::publishPlan | ( | const std::vector< geometry_msgs::PoseStamped > & | path, |
| double | r, | ||
| double | g, | ||
| double | b, | ||
| double | a | ||
| ) |
Publish a path for visualization purposes.
Definition at line 407 of file navfn_ros.cpp.
|
inlineprivate |
Definition at line 159 of file navfn_ros.h.
| bool navfn::NavfnROS::validPointPotential | ( | const geometry_msgs::Point & | world_point | ) |
Check for a valid potential value at a given point in the world (Note: You should call computePotential first)
- Parameters
-
world_point The point to get the potential for
- Returns
- True if the navigation function is valid at that point in the world, false otherwise
Definition at line 96 of file navfn_ros.cpp.
| bool navfn::NavfnROS::validPointPotential | ( | const geometry_msgs::Point & | world_point, |
| double | tolerance | ||
| ) |
Check for a valid potential value at a given point in the world (Note: You should call computePotential first)
- Parameters
-
world_point The point to get the potential for tolerance The tolerance on searching around the world_point specified
- Returns
- True if the navigation function is valid at that point in the world, false otherwise
Definition at line 101 of file navfn_ros.cpp.
Member Data Documentation
|
protected |
Definition at line 155 of file navfn_ros.h.
|
protected |
Store a copy of the current costmap in costmap. Called by makePlan.
Definition at line 151 of file navfn_ros.h.
|
private |
Definition at line 167 of file navfn_ros.h.
|
protected |
Definition at line 155 of file navfn_ros.h.
|
private |
Definition at line 170 of file navfn_ros.h.
|
private |
Definition at line 169 of file navfn_ros.h.
|
protected |
Definition at line 153 of file navfn_ros.h.
|
protected |
Definition at line 152 of file navfn_ros.h.
|
private |
Definition at line 167 of file navfn_ros.h.
|
private |
Definition at line 167 of file navfn_ros.h.
|
protected |
Definition at line 154 of file navfn_ros.h.
|
private |
Definition at line 168 of file navfn_ros.h.
|
protected |
Definition at line 155 of file navfn_ros.h.
The documentation for this class was generated from the following files: