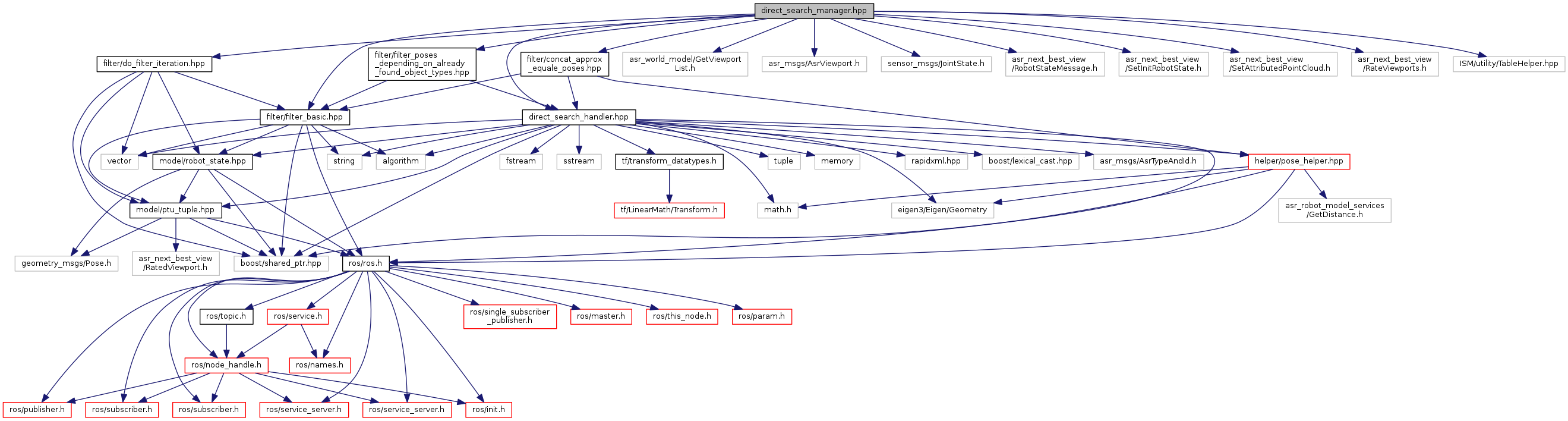
#include <direct_search_handler.hpp>#include <asr_world_model/GetViewportList.h>#include "asr_msgs/AsrViewport.h"#include <sensor_msgs/JointState.h>#include <asr_next_best_view/RobotStateMessage.h>#include <asr_next_best_view/SetInitRobotState.h>#include <asr_next_best_view/SetAttributedPointCloud.h>#include <asr_next_best_view/RateViewports.h>#include "filter/filter_basic.hpp"#include "filter/filter_poses_depending_on_already_found_object_types.hpp"#include "filter/do_filter_iteration.hpp"#include "filter/concat_approx_equale_poses.hpp"#include <ISM/utility/TableHelper.hpp>
Include dependency graph for direct_search_manager.hpp:
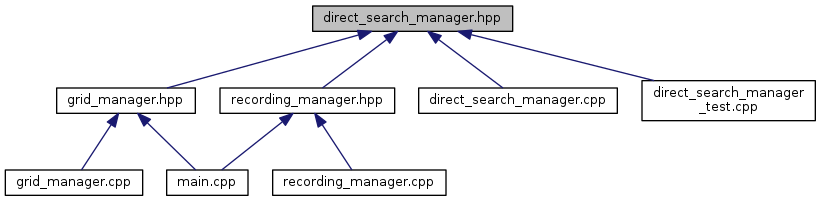
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | directSearchWS::DirectSearchManager |
Namespaces | |
| directSearchWS | |
Functions | |
| bool | directSearchWS::checkSearchedObjectTypesAreEquale (const SearchedObjectTypes &searchecObjectTypes1, const SearchedObjectTypes &searchecObjectTypes2) |
| SearchedObjectTypes | directSearchWS::getSearchedObjectTypesFromAWithoutB (const SearchedObjectTypes &a, const SearchedObjectTypes &b) |