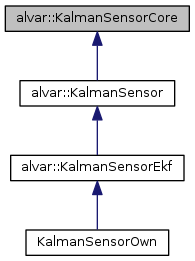
Core implementation for Kalman sensor.
More...
#include <Kalman.h>
|
| CvMat * | H |
| | The matrix (m*n) mapping Kalman state vector into this sensor's measurements vector. More...
|
| |
| CvMat * | K |
| | The matrix (n*m) containing Kalman gain (something between 0 and H^-1). In this core-implementation we assume this to be precalculated. In KalmanSensor this is updated using update_K . More...
|
| |
| CvMat * | z |
| | Latest measurement vector (m*1) More...
|
| |
Core implementation for Kalman sensor.
Definition at line 39 of file Kalman.h.
| alvar::KalmanSensorCore::KalmanSensorCore |
( |
int |
_n, |
|
|
int |
_m |
|
) |
| |
Constructor.
- Parameters
-
| _n | The number of items in the Kalman state vector |
| _m | The number of measurements given by this sensor |
Definition at line 47 of file Kalman.cpp.
| alvar::KalmanSensorCore::~KalmanSensorCore |
( |
| ) |
|
| int alvar::KalmanSensorCore::get_m |
( |
| ) |
|
|
inline |
Accessor for m.
Definition at line 70 of file Kalman.h.
| int alvar::KalmanSensorCore::get_n |
( |
| ) |
|
|
inline |
Accessor for n.
Definition at line 68 of file Kalman.h.
| void alvar::KalmanSensorCore::update_x |
( |
CvMat * |
x_pred, |
|
|
CvMat * |
x |
|
) |
| |
|
virtual |
| CvMat* alvar::KalmanSensorCore::H |
| CvMat* alvar::KalmanSensorCore::H_trans |
|
protected |
| CvMat* alvar::KalmanSensorCore::K |
The matrix (n*m) containing Kalman gain (something between 0 and H^-1). In this core-implementation we assume this to be precalculated. In KalmanSensor this is updated using update_K .
Definition at line 56 of file Kalman.h.
| int alvar::KalmanSensorCore::m |
|
protected |
| int alvar::KalmanSensorCore::n |
|
protected |
| CvMat* alvar::KalmanSensorCore::x_gain |
|
protected |
| CvMat* alvar::KalmanSensorCore::z |
| CvMat* alvar::KalmanSensorCore::z_pred |
|
protected |
| CvMat* alvar::KalmanSensorCore::z_residual |
|
protected |
The documentation for this class was generated from the following files: