#include <OdometryROS.h>
Public Member Functions | |
| const std::string & | frameId () const |
| rtabmap::Transform | getTransform (const std::string &fromFrameId, const std::string &toFrameId, const ros::Time &stamp) const |
| bool | isOdometryF2M () const |
| bool | isPaused () const |
| OdometryROS (bool stereo) | |
| const std::string & | odomFrameId () const |
| const rtabmap::ParametersMap & | parameters () const |
| bool | pause (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| void | processData (const rtabmap::SensorData &data, const ros::Time &stamp) |
| bool | reset (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | resetToPose (rtabmap_ros::ResetPose::Request &, rtabmap_ros::ResetPose::Response &) |
| bool | resume (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogDebug (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogError (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogInfo (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| bool | setLogWarn (std_srvs::Empty::Request &, std_srvs::Empty::Response &) |
| const tf::TransformListener & | tfListener () const |
| virtual | ~OdometryROS () |
Protected Member Functions | |
| virtual void | flushCallbacks ()=0 |
Private Member Functions | |
| virtual void | onInit () |
| virtual void | onOdomInit ()=0 |
Private Attributes | |
| std::string | frameId_ |
| std::string | groundTruthFrameId_ |
| bool | guessFromTf_ |
| rtabmap::Odometry * | odometry_ |
| std::string | odomFrameId_ |
| ros::Publisher | odomInfoPub_ |
| ros::Publisher | odomLastFrame_ |
| ros::Publisher | odomLocalMap_ |
| ros::Publisher | odomPub_ |
| rtabmap::ParametersMap | parameters_ |
| bool | paused_ |
| ros::ServiceServer | pauseSrv_ |
| bool | publishNullWhenLost_ |
| bool | publishTf_ |
| int | resetCountdown_ |
| int | resetCurrentCount_ |
| ros::ServiceServer | resetSrv_ |
| ros::ServiceServer | resetToPoseSrv_ |
| ros::ServiceServer | resumeSrv_ |
| ros::ServiceServer | setLogDebugSrv_ |
| ros::ServiceServer | setLogErrorSrv_ |
| ros::ServiceServer | setLogInfoSrv_ |
| ros::ServiceServer | setLogWarnSrv_ |
| bool | stereo_ |
| tf2_ros::TransformBroadcaster | tfBroadcaster_ |
| tf::TransformListener | tfListener_ |
| bool | waitForTransform_ |
| double | waitForTransformDuration_ |
Detailed Description
Definition at line 50 of file OdometryROS.h.
Constructor & Destructor Documentation
| rtabmap_ros::OdometryROS::OdometryROS | ( | bool | stereo | ) |
Definition at line 58 of file OdometryROS.cpp.
| rtabmap_ros::OdometryROS::~OdometryROS | ( | ) | [virtual] |
Definition at line 76 of file OdometryROS.cpp.
Member Function Documentation
| virtual void rtabmap_ros::OdometryROS::flushCallbacks | ( | ) | [protected, pure virtual] |
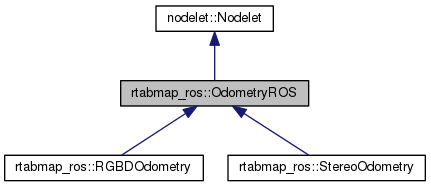
Implemented in rtabmap_ros::RGBDOdometry, and rtabmap_ros::StereoOdometry.
| const std::string& rtabmap_ros::OdometryROS::frameId | ( | ) | const [inline] |
Definition at line 68 of file OdometryROS.h.
| Transform rtabmap_ros::OdometryROS::getTransform | ( | const std::string & | fromFrameId, |
| const std::string & | toFrameId, | ||
| const ros::Time & | stamp | ||
| ) | const |
Definition at line 289 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::isOdometryF2M | ( | ) | const |
Definition at line 550 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::isPaused | ( | ) | const [inline] |
Definition at line 72 of file OdometryROS.h.
| const std::string& rtabmap_ros::OdometryROS::odomFrameId | ( | ) | const [inline] |
Definition at line 69 of file OdometryROS.h.
| void rtabmap_ros::OdometryROS::onInit | ( | ) | [private, virtual] |
Implements nodelet::Nodelet.
Definition at line 90 of file OdometryROS.cpp.
| virtual void rtabmap_ros::OdometryROS::onOdomInit | ( | ) | [private, pure virtual] |
Implemented in rtabmap_ros::RGBDOdometry, and rtabmap_ros::StereoOdometry.
| const rtabmap::ParametersMap& rtabmap_ros::OdometryROS::parameters | ( | ) | const [inline] |
Definition at line 70 of file OdometryROS.h.
| bool rtabmap_ros::OdometryROS::pause | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 572 of file OdometryROS.cpp.
| void rtabmap_ros::OdometryROS::processData | ( | const rtabmap::SensorData & | data, |
| const ros::Time & | stamp | ||
| ) |
Definition at line 317 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::reset | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 555 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::resetToPose | ( | rtabmap_ros::ResetPose::Request & | req, |
| rtabmap_ros::ResetPose::Response & | |||
| ) |
Definition at line 563 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::resume | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 586 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::setLogDebug | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 600 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::setLogError | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 618 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::setLogInfo | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 606 of file OdometryROS.cpp.
| bool rtabmap_ros::OdometryROS::setLogWarn | ( | std_srvs::Empty::Request & | , |
| std_srvs::Empty::Response & | |||
| ) |
Definition at line 612 of file OdometryROS.cpp.
| const tf::TransformListener& rtabmap_ros::OdometryROS::tfListener | ( | ) | const [inline] |
Definition at line 71 of file OdometryROS.h.
Member Data Documentation
std::string rtabmap_ros::OdometryROS::frameId_ [private] |
Definition at line 87 of file OdometryROS.h.
std::string rtabmap_ros::OdometryROS::groundTruthFrameId_ [private] |
Definition at line 89 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::guessFromTf_ [private] |
Definition at line 94 of file OdometryROS.h.
Definition at line 84 of file OdometryROS.h.
std::string rtabmap_ros::OdometryROS::odomFrameId_ [private] |
Definition at line 88 of file OdometryROS.h.
Definition at line 98 of file OdometryROS.h.
Definition at line 100 of file OdometryROS.h.
Definition at line 99 of file OdometryROS.h.
Definition at line 97 of file OdometryROS.h.
Definition at line 95 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::paused_ [private] |
Definition at line 112 of file OdometryROS.h.
Definition at line 103 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::publishNullWhenLost_ [private] |
Definition at line 93 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::publishTf_ [private] |
Definition at line 90 of file OdometryROS.h.
int rtabmap_ros::OdometryROS::resetCountdown_ [private] |
Definition at line 113 of file OdometryROS.h.
int rtabmap_ros::OdometryROS::resetCurrentCount_ [private] |
Definition at line 114 of file OdometryROS.h.
Definition at line 101 of file OdometryROS.h.
Definition at line 102 of file OdometryROS.h.
Definition at line 104 of file OdometryROS.h.
Definition at line 105 of file OdometryROS.h.
Definition at line 108 of file OdometryROS.h.
Definition at line 106 of file OdometryROS.h.
Definition at line 107 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::stereo_ [private] |
Definition at line 115 of file OdometryROS.h.
Definition at line 109 of file OdometryROS.h.
Definition at line 110 of file OdometryROS.h.
bool rtabmap_ros::OdometryROS::waitForTransform_ [private] |
Definition at line 91 of file OdometryROS.h.
double rtabmap_ros::OdometryROS::waitForTransformDuration_ [private] |
Definition at line 92 of file OdometryROS.h.
The documentation for this class was generated from the following files: