#include <CameraThread.h>
Public Member Functions | |
| Camera * | camera () |
| CameraThread (Camera *camera, const ParametersMap ¶meters=ParametersMap()) | |
| bool | isCapturing () const |
| bool | isPaused () const |
| void | setColorOnly (bool colorOnly) |
| void | setImageDecimation (int decimation) |
| void | setImageRate (float imageRate) |
| void | setMirroringEnabled (bool enabled) |
| void | setScanFromDepth (bool enabled, int decimation=4, float maxDepth=4.0f, float voxelSize=0.0f, int normalsK=0) |
| void | setStereoToDepth (bool enabled) |
| virtual | ~CameraThread () |
Private Member Functions | |
| virtual void | mainLoop () |
| virtual void | mainLoopKill () |
Private Attributes | |
| Camera * | _camera |
| bool | _colorOnly |
| int | _imageDecimation |
| bool | _mirroring |
| int | _scanDecimation |
| bool | _scanFromDepth |
| float | _scanMaxDepth |
| float | _scanMinDepth |
| int | _scanNormalsK |
| float | _scanVoxelSize |
| StereoDense * | _stereoDense |
| bool | _stereoToDepth |
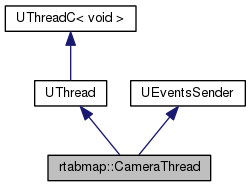
Detailed Description
Class CameraThread
Definition at line 46 of file CameraThread.h.
Constructor & Destructor Documentation
| rtabmap::CameraThread::CameraThread | ( | Camera * | camera, |
| const ParametersMap & | parameters = ParametersMap() |
||
| ) |
Definition at line 47 of file CameraThread.cpp.
| rtabmap::CameraThread::~CameraThread | ( | ) | [virtual] |
Definition at line 64 of file CameraThread.cpp.
Member Function Documentation
| Camera* rtabmap::CameraThread::camera | ( | ) | [inline] |
Definition at line 79 of file CameraThread.h.
| bool rtabmap::CameraThread::isCapturing | ( | ) | const [inline] |
Definition at line 76 of file CameraThread.h.
| bool rtabmap::CameraThread::isPaused | ( | ) | const [inline] |
Definition at line 75 of file CameraThread.h.
| void rtabmap::CameraThread::mainLoop | ( | ) | [private, virtual] |
Pure virtual method mainLoop(). The inner loop of the thread. This method is called repetitively until the thread is killed. Note that if kill() is called in mainLoopBegin(), mainLoop() is not called, terminating immediately the thread.
- See also:
- mainLoop()
- kill()
Implements UThread.
Definition at line 83 of file CameraThread.cpp.
| void rtabmap::CameraThread::mainLoopKill | ( | ) | [private, virtual] |
Virtual method mainLoopKill(). User can implement this function to add a behavior before the thread is killed. When this function is called, the state of the thread is set to kSKilled. It is useful to wake up a sleeping thread to finish his loop and to avoid a deadlock.
Reimplemented from UThread.
Definition at line 248 of file CameraThread.cpp.
| void rtabmap::CameraThread::setColorOnly | ( | bool | colorOnly | ) | [inline] |
Definition at line 56 of file CameraThread.h.
| void rtabmap::CameraThread::setImageDecimation | ( | int | decimation | ) | [inline] |
Definition at line 57 of file CameraThread.h.
| void rtabmap::CameraThread::setImageRate | ( | float | imageRate | ) |
Definition at line 75 of file CameraThread.cpp.
| void rtabmap::CameraThread::setMirroringEnabled | ( | bool | enabled | ) | [inline] |
Definition at line 55 of file CameraThread.h.
| void rtabmap::CameraThread::setScanFromDepth | ( | bool | enabled, |
| int | decimation = 4, |
||
| float | maxDepth = 4.0f, |
||
| float | voxelSize = 0.0f, |
||
| int | normalsK = 0 |
||
| ) | [inline] |
Definition at line 60 of file CameraThread.h.
| void rtabmap::CameraThread::setStereoToDepth | ( | bool | enabled | ) | [inline] |
Definition at line 58 of file CameraThread.h.
Member Data Documentation
Camera* rtabmap::CameraThread::_camera [private] |
Definition at line 86 of file CameraThread.h.
bool rtabmap::CameraThread::_colorOnly [private] |
Definition at line 88 of file CameraThread.h.
int rtabmap::CameraThread::_imageDecimation [private] |
Definition at line 89 of file CameraThread.h.
bool rtabmap::CameraThread::_mirroring [private] |
Definition at line 87 of file CameraThread.h.
int rtabmap::CameraThread::_scanDecimation [private] |
Definition at line 92 of file CameraThread.h.
bool rtabmap::CameraThread::_scanFromDepth [private] |
Definition at line 91 of file CameraThread.h.
float rtabmap::CameraThread::_scanMaxDepth [private] |
Definition at line 93 of file CameraThread.h.
float rtabmap::CameraThread::_scanMinDepth [private] |
Definition at line 94 of file CameraThread.h.
int rtabmap::CameraThread::_scanNormalsK [private] |
Definition at line 96 of file CameraThread.h.
float rtabmap::CameraThread::_scanVoxelSize [private] |
Definition at line 95 of file CameraThread.h.
StereoDense* rtabmap::CameraThread::_stereoDense [private] |
Definition at line 97 of file CameraThread.h.
bool rtabmap::CameraThread::_stereoToDepth [private] |
Definition at line 90 of file CameraThread.h.
The documentation for this class was generated from the following files: