#include <CameraTango.h>
Public Member Functions | |
| CameraTango (int decimation, bool autoExposure) | |
| void | close () |
| void | cloudReceived (const cv::Mat &cloud, double timestamp) |
| virtual std::string | getSerial () const |
| virtual bool | init (const std::string &calibrationFolder=".", const std::string &cameraName="") |
| virtual bool | isCalibrated () const |
| void | poseReceived (const Transform &pose) |
| void | rgbReceived (const cv::Mat &tangoImage, int type, double timestamp) |
| void | setAutoExposure (bool enabled) |
| void | setDecimation (int value) |
| void | tangoEventReceived (int type, const char *key, const char *value) |
| rtabmap::Transform | tangoPoseToTransform (const TangoPoseData *tangoPose, bool inOpenGLFrame) const |
| virtual | ~CameraTango () |
Protected Member Functions | |
| virtual SensorData | captureImage (CameraInfo *info=0) |
Private Member Functions | |
| rtabmap::Transform | getPoseAtTimestamp (double timestamp, bool inOpenGLFrame) |
| virtual void | mainLoop () |
| virtual void | mainLoopBegin () |
Private Attributes | |
| bool | autoExposure_ |
| cv::Mat | cloud_ |
| double | cloudStamp_ |
| boost::mutex | dataMutex_ |
| USemaphore | dataReady_ |
| int | decimation_ |
| rtabmap::Transform | deviceTDepth_ |
| bool | firstFrame_ |
| rtabmap::Transform | imuTDepthCamera_ |
| rtabmap::Transform | imuTDevice_ |
| CameraModel | model_ |
| void * | tango_config_ |
| cv::Mat | tangoColor_ |
| double | tangoColorStamp_ |
| int | tangoColorType_ |
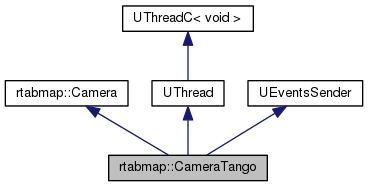
Detailed Description
Definition at line 70 of file CameraTango.h.
Constructor & Destructor Documentation
| rtabmap::CameraTango::CameraTango | ( | int | decimation, |
| bool | autoExposure | ||
| ) |
Definition at line 99 of file CameraTango.cpp.
| rtabmap::CameraTango::~CameraTango | ( | ) | [virtual] |
Definition at line 112 of file CameraTango.cpp.
Member Function Documentation
| SensorData rtabmap::CameraTango::captureImage | ( | CameraInfo * | info = 0 | ) | [protected, virtual] |
returned rgb and depth images should be already rectified if calibration was loaded
Implements rtabmap::Camera.
Definition at line 467 of file CameraTango.cpp.
| void rtabmap::CameraTango::close | ( | ) |
Definition at line 323 of file CameraTango.cpp.
| void rtabmap::CameraTango::cloudReceived | ( | const cv::Mat & | cloud, |
| double | timestamp | ||
| ) |
Definition at line 334 of file CameraTango.cpp.
| rtabmap::Transform rtabmap::CameraTango::getPoseAtTimestamp | ( | double | timestamp, |
| bool | inOpenGLFrame | ||
| ) | [private] |
Definition at line 432 of file CameraTango.cpp.
| std::string rtabmap::CameraTango::getSerial | ( | ) | const [virtual] |
Implements rtabmap::Camera.
Definition at line 396 of file CameraTango.cpp.
| bool rtabmap::CameraTango::init | ( | const std::string & | calibrationFolder = ".", |
| const std::string & | cameraName = "" |
||
| ) | [virtual] |
Implements rtabmap::Camera.
Definition at line 117 of file CameraTango.cpp.
| bool rtabmap::CameraTango::isCalibrated | ( | ) | const [virtual] |
Implements rtabmap::Camera.
Definition at line 391 of file CameraTango.cpp.
| void rtabmap::CameraTango::mainLoop | ( | ) | [private, virtual] |
Pure virtual method mainLoop(). The inner loop of the thread. This method is called repetitively until the thread is killed. Note that if kill() is called in mainLoopBegin(), mainLoop() is not called, terminating immediately the thread.
- See also:
- mainLoop()
- kill()
Implements UThread.
Definition at line 627 of file CameraTango.cpp.
| void rtabmap::CameraTango::mainLoopBegin | ( | ) | [private, virtual] |
Virtual method mainLoopBegin(). User can implement this function to add a behavior before the main loop is started. It is called once (before entering mainLoop()).
Reimplemented from UThread.
Definition at line 622 of file CameraTango.cpp.
| void rtabmap::CameraTango::poseReceived | ( | const Transform & | pose | ) |
Definition at line 378 of file CameraTango.cpp.
| void rtabmap::CameraTango::rgbReceived | ( | const cv::Mat & | tangoImage, |
| int | type, | ||
| double | timestamp | ||
| ) |
Definition at line 353 of file CameraTango.cpp.
| void rtabmap::CameraTango::setAutoExposure | ( | bool | enabled | ) | [inline] |
Definition at line 81 of file CameraTango.h.
| void rtabmap::CameraTango::setDecimation | ( | int | value | ) | [inline] |
Definition at line 80 of file CameraTango.h.
| void rtabmap::CameraTango::tangoEventReceived | ( | int | type, |
| const char * | key, | ||
| const char * | value | ||
| ) |
Definition at line 386 of file CameraTango.cpp.
| rtabmap::Transform rtabmap::CameraTango::tangoPoseToTransform | ( | const TangoPoseData * | tangoPose, |
| bool | inOpenGLFrame | ||
| ) | const |
Definition at line 401 of file CameraTango.cpp.
Member Data Documentation
bool rtabmap::CameraTango::autoExposure_ [private] |
Definition at line 101 of file CameraTango.h.
cv::Mat rtabmap::CameraTango::cloud_ [private] |
Definition at line 102 of file CameraTango.h.
double rtabmap::CameraTango::cloudStamp_ [private] |
Definition at line 103 of file CameraTango.h.
boost::mutex rtabmap::CameraTango::dataMutex_ [private] |
Definition at line 107 of file CameraTango.h.
USemaphore rtabmap::CameraTango::dataReady_ [private] |
Definition at line 108 of file CameraTango.h.
int rtabmap::CameraTango::decimation_ [private] |
Definition at line 100 of file CameraTango.h.
Definition at line 111 of file CameraTango.h.
bool rtabmap::CameraTango::firstFrame_ [private] |
Definition at line 99 of file CameraTango.h.
Definition at line 110 of file CameraTango.h.
Definition at line 109 of file CameraTango.h.
CameraModel rtabmap::CameraTango::model_ [private] |
Definition at line 112 of file CameraTango.h.
void* rtabmap::CameraTango::tango_config_ [private] |
Definition at line 98 of file CameraTango.h.
cv::Mat rtabmap::CameraTango::tangoColor_ [private] |
Definition at line 104 of file CameraTango.h.
double rtabmap::CameraTango::tangoColorStamp_ [private] |
Definition at line 106 of file CameraTango.h.
int rtabmap::CameraTango::tangoColorType_ [private] |
Definition at line 105 of file CameraTango.h.
The documentation for this class was generated from the following files: