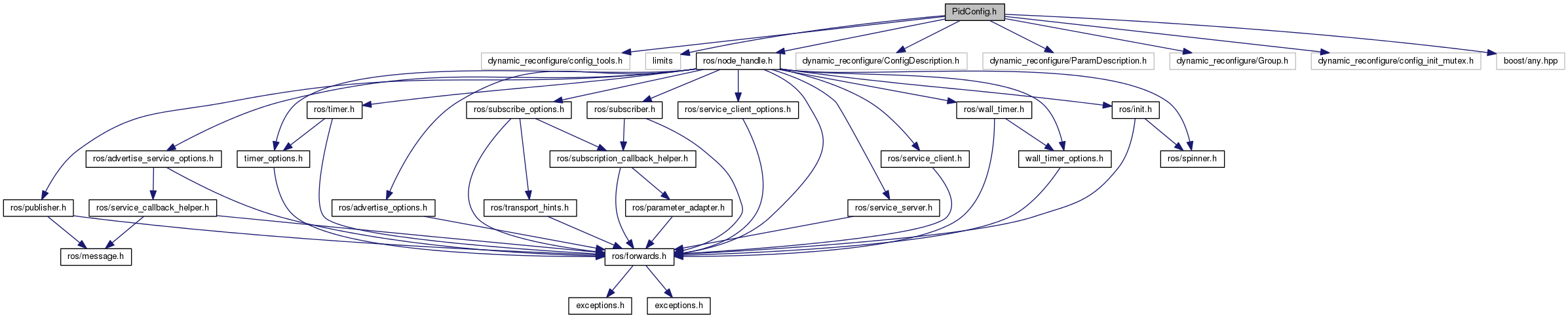
#include <dynamic_reconfigure/config_tools.h>#include <limits>#include <ros/node_handle.h>#include <dynamic_reconfigure/ConfigDescription.h>#include <dynamic_reconfigure/ParamDescription.h>#include <dynamic_reconfigure/Group.h>#include <dynamic_reconfigure/config_init_mutex.h>#include <boost/any.hpp>
Include dependency graph for PidConfig.h:
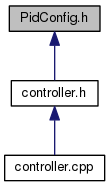
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pid::PidConfig::AbstractGroupDescription |
| class | pid::PidConfig::AbstractParamDescription |
| class | pid::PidConfig::DEFAULT |
| class | pid::PidConfig::GroupDescription< T, PT > |
| class | pid::PidConfig::ParamDescription< T > |
| class | pid::PidConfig |
| class | pid::PidConfigStatics |
Namespaces | |
| namespace | pid |
Variables | |
| const double | pid::Pid_scale_hundred = 100.0 |
| const double | pid::Pid_scale_ten = 10.0 |
| const double | pid::Pid_scale_tenth = 0.1 |
| const double | pid::Pid_scale_unity = 1.0 |