Classes for defining open/closed kinematic chains. More...
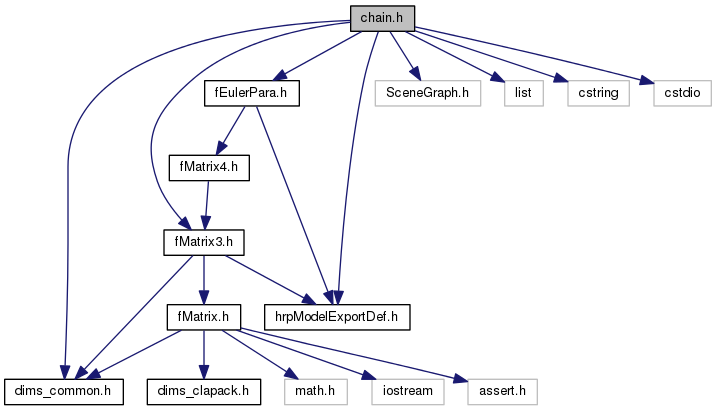
#include <dims_common.h>#include <fMatrix3.h>#include <fEulerPara.h>#include <SceneGraph.h>#include <list>#include <cstring>#include <cstdio>#include "hrpModelExportDef.h"
Include dependency graph for chain.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Chain |
| The class representing the whole mechanism. May contain multiple characters. More... | |
| class | Joint |
| The class for representing a joint. More... | |
| struct | JointData |
| Temporary storage for basic joint information. More... | |
| struct | Chain::scale_object |
| XML utility functions. More... | |
Defines | |
| #define | DEFAULT_MAX_INTEG_ERROR 1e-4 |
| #define | DEFAULT_MIN_TIMESTEP 1e-6 |
| Defines for IntegAdaptiveEuler. | |
Enumerations | |
| enum | AxisIndex { AXIS_NULL = -1, AXIS_X, AXIS_Y, AXIS_Z } |
| Direction of a 1-DOF joint. More... | |
| enum | JointType { JUNKNOWN = 0, JFIXED, JROTATE, JSLIDE, JSPHERE, JFREE } |
| Enums for joint types. More... | |
Functions | |
| char * | CharName (const char *_name) |
| Extracts the character name from a joint name. | |
Detailed Description
Define Documentation
| #define DEFAULT_MAX_INTEG_ERROR 1e-4 |
| #define DEFAULT_MIN_TIMESTEP 1e-6 |
Enumeration Type Documentation
| enum AxisIndex |
| enum JointType |