#include <OccupancyGridMap.h>
Classes | |
| struct | TFixturePtr |
| struct | TInfoPerCollidableobj |
Public Member Functions | |
| const COccupancyGridMap2D & | getOccGrid () const |
| COccupancyGridMap2D & | getOccGrid () |
| virtual void | gui_update (mrpt::opengl::COpenGLScene &scene) |
| See docs in base class. | |
| virtual void | loadConfigFrom (const rapidxml::xml_node< char > *root) |
| See docs in base class. | |
| OccupancyGridMap (World *parent, const rapidxml::xml_node< char > *root) | |
| virtual void | simul_pre_timestep (const TSimulContext &context) |
| See docs in base class. | |
| virtual | ~OccupancyGridMap () |
Protected Attributes | |
| mrpt::opengl::CSetOfObjects::Ptr | m_gl_grid |
| call of gui_update() | |
| std::vector < mrpt::opengl::CSetOfObjects::Ptr > | m_gl_obs_clouds |
| std::vector < mrpt::opengl::CPointCloud::Ptr > | m_gl_obs_clouds_buffer |
| std::mutex | m_gl_obs_clouds_buffer_cs |
| COccupancyGridMap2D | m_grid |
| bool | m_gui_uptodate |
| double | m_lateral_friction |
| (Default: 0.5) | |
| std::vector < TInfoPerCollidableobj > | m_obstacles_for_each_obj |
| double | m_restitution |
| Elastic restitution coef (default: 0.01) | |
| bool | m_show_grid_collision_points |
| CSinCosLookUpTableFor2DScans | m_sincos_lut |
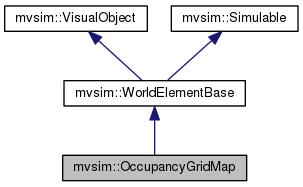
Detailed Description
Definition at line 34 of file OccupancyGridMap.h.
Constructor & Destructor Documentation
| OccupancyGridMap::OccupancyGridMap | ( | World * | parent, |
| const rapidxml::xml_node< char > * | root | ||
| ) |
Definition at line 34 of file OccupancyGridMap.cpp.
| OccupancyGridMap::~OccupancyGridMap | ( | ) | [virtual] |
Definition at line 45 of file OccupancyGridMap.cpp.
Member Function Documentation
| const COccupancyGridMap2D& mvsim::OccupancyGridMap::getOccGrid | ( | ) | const [inline] |
Definition at line 49 of file OccupancyGridMap.h.
| COccupancyGridMap2D& mvsim::OccupancyGridMap::getOccGrid | ( | ) | [inline] |
Definition at line 50 of file OccupancyGridMap.h.
| void OccupancyGridMap::gui_update | ( | mrpt::opengl::COpenGLScene & | scene | ) | [virtual] |
See docs in base class.
Implements mvsim::VisualObject.
Definition at line 99 of file OccupancyGridMap.cpp.
| void OccupancyGridMap::loadConfigFrom | ( | const rapidxml::xml_node< char > * | root | ) | [virtual] |
See docs in base class.
Implements mvsim::WorldElementBase.
Definition at line 46 of file OccupancyGridMap.cpp.
| void OccupancyGridMap::simul_pre_timestep | ( | const TSimulContext & | context | ) | [virtual] |
See docs in base class.
Reimplemented from mvsim::Simulable.
Definition at line 147 of file OccupancyGridMap.cpp.
Member Data Documentation
mrpt::opengl::CSetOfObjects::Ptr mvsim::OccupancyGridMap::m_gl_grid [protected] |
call of gui_update()
Definition at line 56 of file OccupancyGridMap.h.
std::vector<mrpt::opengl::CSetOfObjects::Ptr> mvsim::OccupancyGridMap::m_gl_obs_clouds [protected] |
Definition at line 76 of file OccupancyGridMap.h.
std::vector<mrpt::opengl::CPointCloud::Ptr> mvsim::OccupancyGridMap::m_gl_obs_clouds_buffer [protected] |
Definition at line 79 of file OccupancyGridMap.h.
std::mutex mvsim::OccupancyGridMap::m_gl_obs_clouds_buffer_cs [protected] |
Definition at line 78 of file OccupancyGridMap.h.
COccupancyGridMap2D mvsim::OccupancyGridMap::m_grid [protected] |
Definition at line 52 of file OccupancyGridMap.h.
bool mvsim::OccupancyGridMap::m_gui_uptodate [protected] |
Whether m_gl_grid has to be updated upon next
Definition at line 54 of file OccupancyGridMap.h.
double mvsim::OccupancyGridMap::m_lateral_friction [protected] |
(Default: 0.5)
Definition at line 85 of file OccupancyGridMap.h.
std::vector<TInfoPerCollidableobj> mvsim::OccupancyGridMap::m_obstacles_for_each_obj [protected] |
Definition at line 75 of file OccupancyGridMap.h.
double mvsim::OccupancyGridMap::m_restitution [protected] |
Elastic restitution coef (default: 0.01)
Definition at line 84 of file OccupancyGridMap.h.
bool mvsim::OccupancyGridMap::m_show_grid_collision_points [protected] |
Definition at line 83 of file OccupancyGridMap.h.
CSinCosLookUpTableFor2DScans mvsim::OccupancyGridMap::m_sincos_lut [protected] |
Definition at line 81 of file OccupancyGridMap.h.
The documentation for this class was generated from the following files: