#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl_conversions/pcl_conversions.h>#include <geometry_msgs/Point32.h>#include <eigen_conversions/eigen_msg.h>#include <tf_conversions/tf_eigen.h>#include <pcl/range_image/range_image_planar.h>#include <visualization_msgs/Marker.h>#include <opencv2/opencv.hpp>
Include dependency graph for pcl_conversion_util.h:

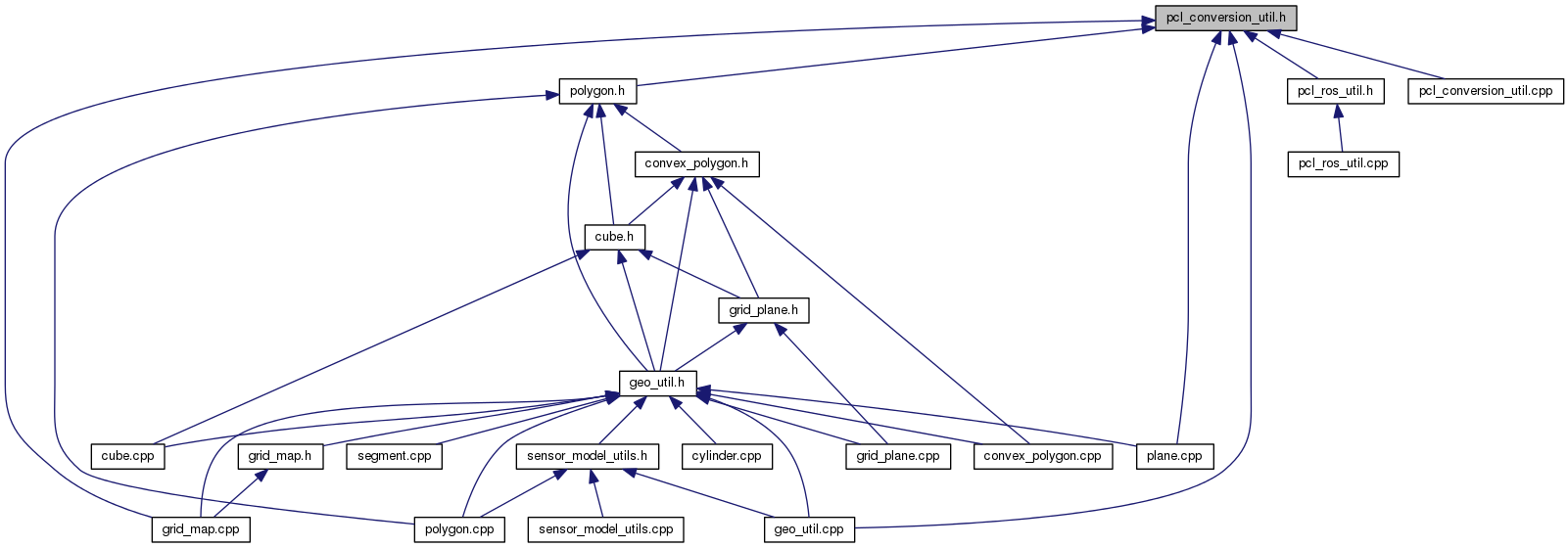
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | jsk_recognition_utils |
| namespace | pcl_conversions |
| namespace | tf |
Typedefs | |
| typedef pcl::PointIndices | PCLIndicesMsg |
| typedef pcl::ModelCoefficients | PCLModelCoefficientMsg |
Functions | |
| void | jsk_recognition_utils::convertEigenAffine3 (const Eigen::Affine3d &from, Eigen::Affine3f &to) |
| void | jsk_recognition_utils::convertEigenAffine3 (const Eigen::Affine3f &from, Eigen::Affine3d &to) |
| template<class FromT , class ToT > | |
| void | jsk_recognition_utils::convertMatrix4 (const FromT &from, ToT &to) |
| std::vector < pcl::ModelCoefficients::Ptr > | pcl_conversions::convertToPCLModelCoefficients (const std::vector< PCLModelCoefficientMsg > &coefficients) |
| std::vector < pcl::PointIndices::Ptr > | pcl_conversions::convertToPCLPointIndices (const std::vector< PCLIndicesMsg > &cluster_indices) |
| std::vector < PCLModelCoefficientMsg > | pcl_conversions::convertToROSModelCoefficients (const std::vector< pcl::ModelCoefficients::Ptr > &coefficients, const std_msgs::Header &header) |
| std::vector< PCLIndicesMsg > | pcl_conversions::convertToROSPointIndices (const std::vector< pcl::PointIndices::Ptr > cluster_indices, const std_msgs::Header &header) |
| std::vector< PCLIndicesMsg > | pcl_conversions::convertToROSPointIndices (const std::vector< pcl::PointIndices > cluster_indices, const std_msgs::Header &header) |
| bool | jsk_recognition_utils::isValidPoint (const pcl::PointXYZ &p) |
| template<class PointT > | |
| bool | jsk_recognition_utils::isValidPoint (const PointT &p) |
| template<class PointT > | |
| void | jsk_recognition_utils::markerMsgToPointCloud (const visualization_msgs::Marker &input_marker, int sample_nums, pcl::PointCloud< PointT > &output_cloud) |
| template<class FromT , class ToT > | |
| void | jsk_recognition_utils::pointFromVectorToVector (const FromT &from, ToT &to) |
| template<class FromT , class ToT > | |
| void | jsk_recognition_utils::pointFromVectorToXYZ (const FromT &p, ToT &msg) |
| template<class FromT , class ToT > | |
| void | jsk_recognition_utils::pointFromXYZToVector (const FromT &msg, ToT &p) |
| template<class FromT , class ToT > | |
| void | jsk_recognition_utils::pointFromXYZToXYZ (const FromT &from, ToT &to) |
| void | tf::poseEigenToMsg (Eigen::Affine3f &eigen, geometry_msgs::Pose &msg) |
| void | tf::poseMsgToEigen (const geometry_msgs::Pose &msg, Eigen::Affine3f &eigen) |
| void | jsk_recognition_utils::rangeImageToCvMat (const pcl::RangeImage &range_image, cv::Mat &mat) |
| Convert pcl::RangeImage to cv::Mat. Distance is normalized to 0-1 and colorized. | |
| void | tf::transformEigenToMsg (Eigen::Affine3f &eigen, geometry_msgs::Transform &msg) |
| void | tf::transformEigenToTF (Eigen::Affine3f &eigen, tf::Transform &t) |
| void | tf::transformMsgToEigen (const geometry_msgs::Transform &msg, Eigen::Affine3f &eigen) |
| void | tf::transformTFToEigen (const tf::Transform &t, Eigen::Affine3f &eigen) |
| void | tf::vectorEigenToTF (const Eigen::Vector3f &e, tf::Vector3 &t) |
| void | tf::vectorTFToEigen (const tf::Vector3 &t, Eigen::Vector3f &e) |
Typedef Documentation
| typedef pcl::PointIndices PCLIndicesMsg |
Definition at line 52 of file pcl_conversion_util.h.
| typedef pcl::ModelCoefficients PCLModelCoefficientMsg |
Definition at line 53 of file pcl_conversion_util.h.