#include <map_merger.h>
Public Slots | |
| void | onGetTransform () |
| void | onMergePressed () |
| void | onSaveGeotiffPressed () |
| void | onSlider1Moved (int idx) |
| void | onSlider2Moved (int idx) |
| void | onStateUseTransformChanged (int checked) |
Public Member Functions | |
| nav_msgs::OccupancyGrid | cvMatToOccupancyGrid (const cv::Mat *im) |
| bool | eventFilter (QObject *watched, QEvent *event) |
| virtual void | initPlugin (qt_gui_cpp::PluginContext &context) |
| MapMerger () | |
| cv::Mat | occupancyGridToCvMat (const nav_msgs::OccupancyGrid *map) |
| void | redraw_Label_1 () |
| void | redraw_Label_2 () |
| void | redraw_Label_merged () |
| virtual void | shutdownPlugin () |
| void | timerCallback (const ros::TimerEvent &e) |
Protected Member Functions | |
| void | map1Callback (nav_msgs::OccupancyGridConstPtr const &map) |
| void | map2Callback (nav_msgs::OccupancyGridConstPtr const &map) |
Protected Attributes | |
| cv::Mat | conversion_mat_ |
| int | current_idx_1_ |
| int | current_idx_2_ |
| cv::Mat | current_transform |
| cv::Mat | cv_map_1_ |
| cv::Mat | cv_map_2_ |
| std::vector< cv::Mat > | cv_maps_1_ |
| std::vector< cv::Mat > | cv_maps_2_ |
| int | first_map_1_received |
| int | first_map_2_received |
| ros::Publisher | hector_command_pub_ |
| ros::Subscriber | map_1_sub_ |
| ros::Publisher | map_1_to_use_pub_ |
| ros::Subscriber | map_2_sub_ |
| ros::Publisher | map_2_to_use_pub_ |
| ros::Timer | map_save_timer_ |
| ros::NodeHandle | my_nh_ |
| nav_msgs::OccupancyGrid | og_map_1_ |
| nav_msgs::OccupancyGrid | og_map_2_ |
| std::vector < nav_msgs::OccupancyGrid > | og_maps_1_ |
| std::vector < nav_msgs::OccupancyGrid > | og_maps_2_ |
| QImage | qimage_1_ |
| QImage | qimage_2_ |
| QImage | qimage_merged_ |
| QMutex | qimage_mutex_ |
| std::vector< QImage > | qimages_1_ |
| std::vector< QImage > | qimages_2_ |
| int | stored_idx_1_ |
| int | stored_idx_2_ |
| cv::Mat | stored_transform |
| image_transport::Subscriber | subscriber_ |
| Ui::MapMergerWidget | ui_ |
| bool | use_stored_transform_ |
| QWidget * | widget_ |
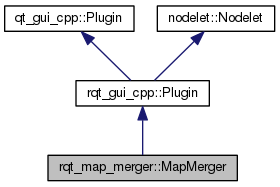
Detailed Description
Definition at line 59 of file map_merger.h.
Constructor & Destructor Documentation
Definition at line 54 of file map_merger.cpp.
Member Function Documentation
| nav_msgs::OccupancyGrid rqt_map_merger::MapMerger::cvMatToOccupancyGrid | ( | const cv::Mat * | im | ) |
Definition at line 324 of file map_merger.cpp.
| bool rqt_map_merger::MapMerger::eventFilter | ( | QObject * | watched, |
| QEvent * | event | ||
| ) |
Definition at line 247 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::initPlugin | ( | qt_gui_cpp::PluginContext & | context | ) | [virtual] |
Reimplemented from qt_gui_cpp::Plugin.
Definition at line 61 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::map1Callback | ( | nav_msgs::OccupancyGridConstPtr const & | map | ) | [protected] |
Definition at line 276 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::map2Callback | ( | nav_msgs::OccupancyGridConstPtr const & | map | ) | [protected] |
Definition at line 300 of file map_merger.cpp.
| cv::Mat rqt_map_merger::MapMerger::occupancyGridToCvMat | ( | const nav_msgs::OccupancyGrid * | map | ) |
Definition at line 345 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onGetTransform | ( | ) | [slot] |
Definition at line 156 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onMergePressed | ( | ) | [slot] |
Definition at line 146 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onSaveGeotiffPressed | ( | ) | [slot] |
Definition at line 167 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onSlider1Moved | ( | int | idx | ) | [slot] |
Definition at line 126 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onSlider2Moved | ( | int | idx | ) | [slot] |
Definition at line 136 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::onStateUseTransformChanged | ( | int | checked | ) | [slot] |
Definition at line 150 of file map_merger.cpp.
Definition at line 173 of file map_merger.cpp.
Definition at line 192 of file map_merger.cpp.
Definition at line 212 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::shutdownPlugin | ( | ) | [virtual] |
Reimplemented from rqt_gui_cpp::Plugin.
Definition at line 271 of file map_merger.cpp.
| void rqt_map_merger::MapMerger::timerCallback | ( | const ros::TimerEvent & | e | ) |
Definition at line 113 of file map_merger.cpp.
Member Data Documentation
cv::Mat rqt_map_merger::MapMerger::conversion_mat_ [protected] |
Definition at line 128 of file map_merger.h.
int rqt_map_merger::MapMerger::current_idx_1_ [protected] |
Definition at line 134 of file map_merger.h.
int rqt_map_merger::MapMerger::current_idx_2_ [protected] |
Definition at line 135 of file map_merger.h.
cv::Mat rqt_map_merger::MapMerger::current_transform [protected] |
Definition at line 130 of file map_merger.h.
cv::Mat rqt_map_merger::MapMerger::cv_map_1_ [protected] |
Definition at line 116 of file map_merger.h.
cv::Mat rqt_map_merger::MapMerger::cv_map_2_ [protected] |
Definition at line 122 of file map_merger.h.
std::vector<cv::Mat> rqt_map_merger::MapMerger::cv_maps_1_ [protected] |
Definition at line 113 of file map_merger.h.
std::vector<cv::Mat> rqt_map_merger::MapMerger::cv_maps_2_ [protected] |
Definition at line 119 of file map_merger.h.
int rqt_map_merger::MapMerger::first_map_1_received [protected] |
Definition at line 141 of file map_merger.h.
int rqt_map_merger::MapMerger::first_map_2_received [protected] |
Definition at line 142 of file map_merger.h.
Definition at line 148 of file map_merger.h.
ros::Subscriber rqt_map_merger::MapMerger::map_1_sub_ [protected] |
Definition at line 109 of file map_merger.h.
Definition at line 146 of file map_merger.h.
ros::Subscriber rqt_map_merger::MapMerger::map_2_sub_ [protected] |
Definition at line 110 of file map_merger.h.
Definition at line 147 of file map_merger.h.
ros::Timer rqt_map_merger::MapMerger::map_save_timer_ [protected] |
Definition at line 144 of file map_merger.h.
ros::NodeHandle rqt_map_merger::MapMerger::my_nh_ [protected] |
Definition at line 132 of file map_merger.h.
nav_msgs::OccupancyGrid rqt_map_merger::MapMerger::og_map_1_ [protected] |
Definition at line 117 of file map_merger.h.
nav_msgs::OccupancyGrid rqt_map_merger::MapMerger::og_map_2_ [protected] |
Definition at line 123 of file map_merger.h.
std::vector<nav_msgs::OccupancyGrid> rqt_map_merger::MapMerger::og_maps_1_ [protected] |
Definition at line 114 of file map_merger.h.
std::vector<nav_msgs::OccupancyGrid> rqt_map_merger::MapMerger::og_maps_2_ [protected] |
Definition at line 120 of file map_merger.h.
QImage rqt_map_merger::MapMerger::qimage_1_ [protected] |
Definition at line 115 of file map_merger.h.
QImage rqt_map_merger::MapMerger::qimage_2_ [protected] |
Definition at line 121 of file map_merger.h.
QImage rqt_map_merger::MapMerger::qimage_merged_ [protected] |
Definition at line 125 of file map_merger.h.
QMutex rqt_map_merger::MapMerger::qimage_mutex_ [protected] |
Definition at line 126 of file map_merger.h.
std::vector<QImage> rqt_map_merger::MapMerger::qimages_1_ [protected] |
Definition at line 112 of file map_merger.h.
std::vector<QImage> rqt_map_merger::MapMerger::qimages_2_ [protected] |
Definition at line 118 of file map_merger.h.
int rqt_map_merger::MapMerger::stored_idx_1_ [protected] |
Definition at line 137 of file map_merger.h.
int rqt_map_merger::MapMerger::stored_idx_2_ [protected] |
Definition at line 138 of file map_merger.h.
cv::Mat rqt_map_merger::MapMerger::stored_transform [protected] |
Definition at line 129 of file map_merger.h.
Definition at line 107 of file map_merger.h.
Ui::MapMergerWidget rqt_map_merger::MapMerger::ui_ [protected] |
Definition at line 103 of file map_merger.h.
bool rqt_map_merger::MapMerger::use_stored_transform_ [protected] |
Definition at line 140 of file map_merger.h.
QWidget* rqt_map_merger::MapMerger::widget_ [protected] |
Definition at line 105 of file map_merger.h.
The documentation for this class was generated from the following files: