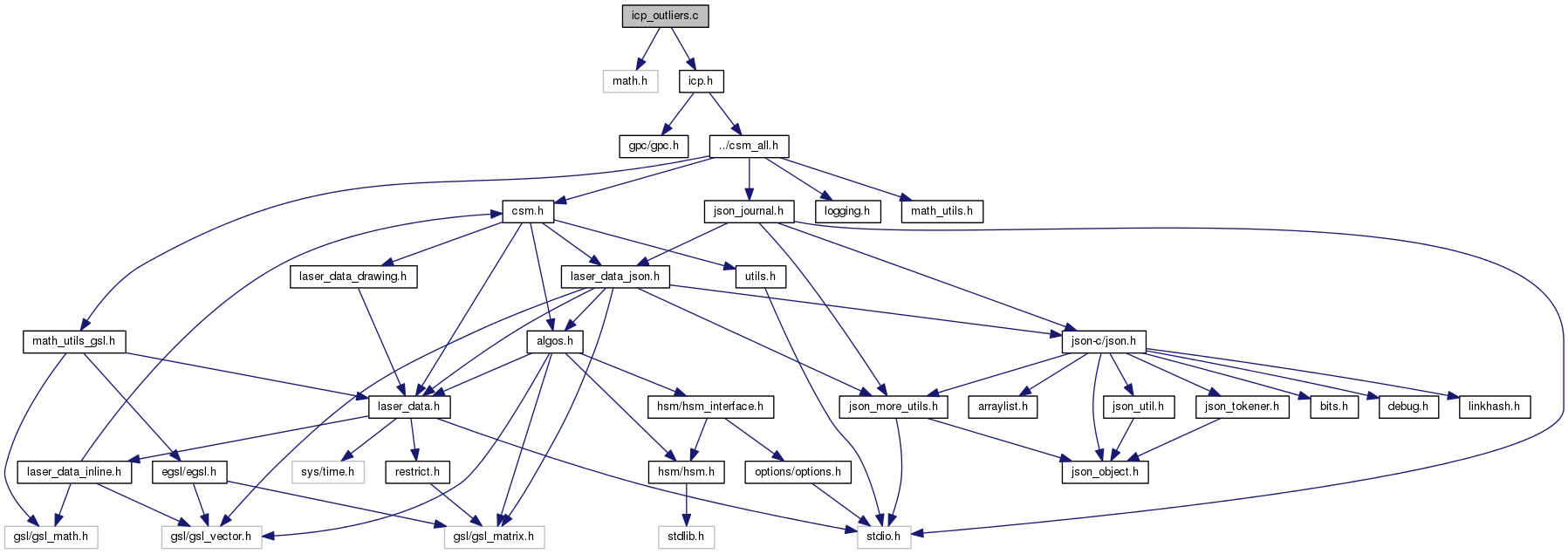
Include dependency graph for icp_outliers.c:
Go to the source code of this file.
Functions | |
| double | hoare_selection (double *data, int start, int end, int k) |
| void | kill_outliers_double (struct sm_params *params) |
| void | kill_outliers_trim (struct sm_params *params, double *total_error) |
| void | quicksort (double *array, int begin, int end) |
| void | swap_double (double *a, double *b) |
| void | visibilityTest (LDP laser_ref, const gsl_vector *u) |
Function Documentation
| double hoare_selection | ( | double * | data, |
| int | start, | ||
| int | end, | ||
| int | k | ||
| ) |
| void kill_outliers_double | ( | struct sm_params * | params | ) |
If multiple points in laser_sens match to the same point in laser_ref, only the nearest one wins.
Uses: laser_sens->corr, laser_sens->p Modifies: laser_sens->corr
Definition at line 42 of file icp_outliers.c.
| void kill_outliers_trim | ( | struct sm_params * | params, |
| double * | total_error | ||
| ) |
Trims the corrispondences using an adaptive algorithm
Assumes cartesian coordinates computed. (points and points_w)
So, to disable this: outliers_maxPerc = 1 outliers_adaptive_order = 1
Definition at line 83 of file icp_outliers.c.
| void quicksort | ( | double * | array, |
| int | begin, | ||
| int | end | ||
| ) |
Code taken from Wikipedia
Definition at line 186 of file icp_outliers.c.
| void swap_double | ( | double * | a, |
| double * | b | ||
| ) |
Definition at line 181 of file icp_outliers.c.
| void visibilityTest | ( | LDP | laser_ref, |
| const gsl_vector * | u | ||
| ) |
expects cartesian valid
Definition at line 9 of file icp_outliers.c.