World configuration information. More...
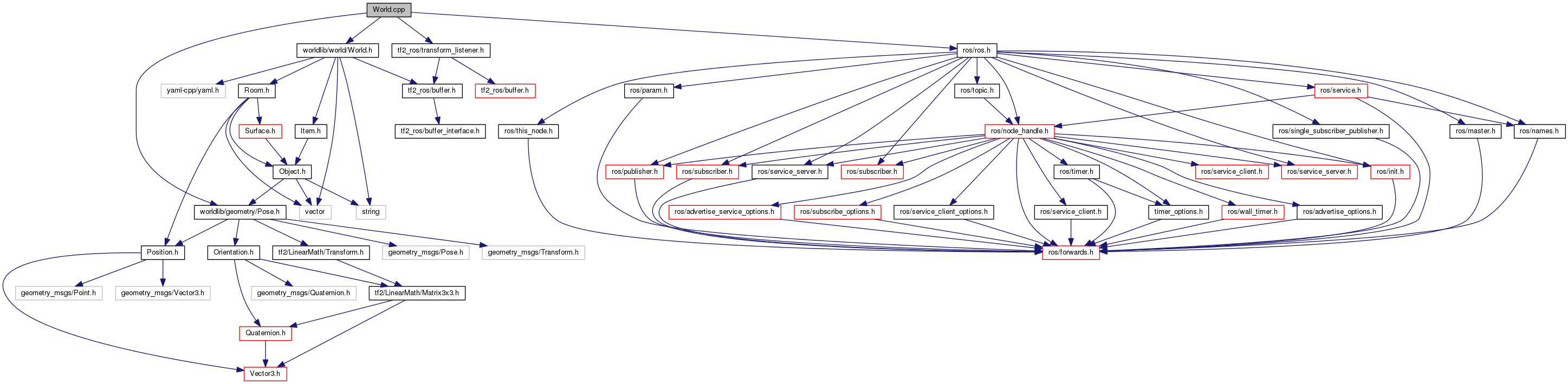
#include "worldlib/geometry/Pose.h"#include "worldlib/world/World.h"#include <ros/ros.h>#include <tf2_ros/transform_listener.h>
Include dependency graph for World.cpp:
Go to the source code of this file.
Detailed Description
World configuration information.
A world consists of a series of rooms, surfaces, and items. Surfaces can have points of interest as well.
- Date:
- April 22, 2015
Definition in file World.cpp.