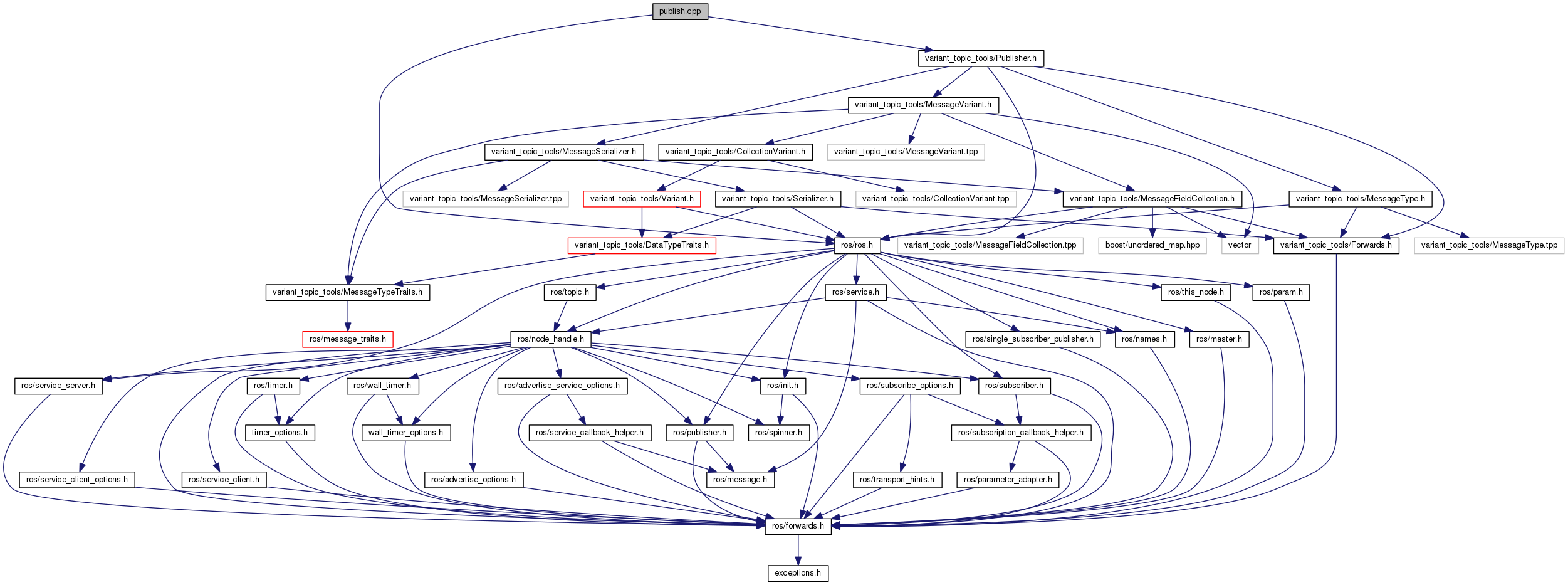
Include dependency graph for publish.cpp:
Go to the source code of this file.
Functions | |
| bool | getTopicBase (const std::string &topic, std::string &topicBase) |
| int | main (int argc, char **argv) |
| void | publish (const ros::TimerEvent &event) |
| void | publishOnce () |
Variables | |
| variant_topic_tools::MessageDefinition | messageDefinition |
| variant_topic_tools::MessageType | messageType |
| ros::NodeHandlePtr | nodeHandle |
| variant_topic_tools::Publisher | publisher |
| size_t | publisherQueueSize = 100 |
| double | publisherRate = 0.0 |
| ros::Timer | publisherTimer |
| std::string | publisherTopic |
| std::string | publisherType |
Function Documentation
| bool getTopicBase | ( | const std::string & | topic, |
| std::string & | topicBase | ||
| ) |
Definition at line 35 of file publish.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 76 of file publish.cpp.
| void publish | ( | const ros::TimerEvent & | event | ) |
Definition at line 72 of file publish.cpp.
| void publishOnce | ( | ) |
Definition at line 55 of file publish.cpp.
Variable Documentation
Definition at line 32 of file publish.cpp.
Definition at line 33 of file publish.cpp.
Definition at line 23 of file publish.cpp.
Definition at line 25 of file publish.cpp.
| size_t publisherQueueSize = 100 |
Definition at line 29 of file publish.cpp.
| double publisherRate = 0.0 |
Definition at line 28 of file publish.cpp.
Definition at line 30 of file publish.cpp.
| std::string publisherTopic |
Definition at line 26 of file publish.cpp.
| std::string publisherType |
Definition at line 27 of file publish.cpp.